Picosatélites cansat: una herramienta para la educación en ciencias del espacio

Ángel Colín*
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016
Hace aproximadamente seis décadas que el primer satélite artificial, el Sputnik I, fue lanzado al espacio y puesto en órbita (NASA,2007). Toda su electrónica e instrumentación estaba contenida en una esfera de aluminio de unos 60 cm de diámetro, cuya masa total era de alrededor de 80kg. Lo más destacado en su misión fue la caracterización física de las capas altas de la atmósfera, así como la propagación de ondas de radio en la ionósfera. Logró transmitir datos de temperatura y presión por medio de telemetría a las frecuencias de 20 y 40 MHz.
Aunque su tiempo de operación fue de apenas tres meses, dejó marcado en la historia el comienzo de una nueva era para las actividades espaciales. Desde entonces, muchos han sido los avances en materia de tecnología espacial.
Hoy en día, se encuentran miles de satélites artificiales orbitando nuestro planeta, realizando una gran variedad de misiones específicas. El mercado de las telecomunicaciones es la principal aplicación comercial de estos satélites, pero también hay otros que han sido construidos para realizar investigaciones científicas: estudios meteorológicos, exploración y observación de la Tierra y muchos más en astronomía. De igual manera, otros han sido construidos para fines militares y de defensa.
La inversión económica en la planeación, diseño y construcción de un satélite artificial es bastante elevada, debido a que, para su desarrollo, se requiere la mejor tecnología de vanguardia y de un personal altamente calificado. Tanto la Unión Europea como los Estados Unidos de América, así como el resto de los países desarrollados, cuentan con un gran número de satélites puestos en órbita y se han preocupado por establecer programas de capacitación para sus futuras generaciones de ingenieros (Walker et al., 2010). En contraste, los países en vías de desarrollo apenas tienen algunas instituciones que cuentan con oferta educativa para la formación de recursos humanos en el sector espacial, mientras tanto, las tecnologías emergentes utilizadas en esta rama siguen creciendo de manera exponencial.
Las pequeñas dimensiones de los componentes eléctricos y electrónicos, que ahora se fabrican, cada vez son más solicitados en la mayoría de las tecnologías presentes. En particular, la construcción de satélites miniaturizados exige una gran demanda de ellos, pero exige también que dichos componentes sean sometidos a las pruebas correspondientes, según los estándares, para validar su desempeño en el espacio. Tales pruebas pueden comprender: alto vacío, choque térmico, radiación electromagnética, etcétera.
Estos pequeños satélites juegan un papel muy importante no sólo en el sector académico, también en proyectos de investigación, en los que algunos instrumentos compactos pueden ser integrados en su carga útil. Pero, sobre todo, son importantes porque el tiempo y costo para construirlos es muy reducido en comparación con los satélites de tamaño estándar.
La sustitución de los satélites de gran tamaño por constelaciones de satélites pequeños se está convirtiendo en una alternativa de mucho interés tanto para las agencias espaciales como para las instituciones académicas y las empresas dedicadas al sector espacial, por lo que, ahora, destinan parte de sus recursos económicos a la miniaturización de los satélites para llevar a cabo sus misiones.
CLASIFICACIÓN DE SATÉLITES ARTIFICIALES
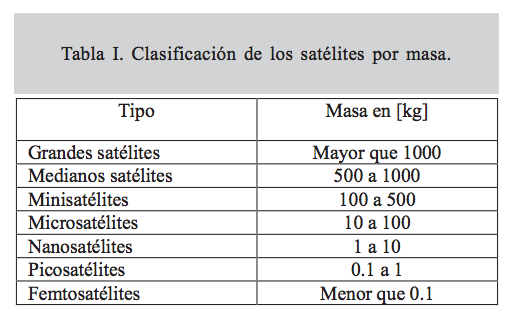
Los satélites artificiales pueden ser clasificados de diferentes maneras: tamaño, costo, función, tipo de órbita, etcétera, pero su clasificación por masa casi siempre suele estar relacionada directamente con los costos de lanzamiento para la puesta en órbita. En la tabla I se muestra una clasificación general adoptada en los últimos años.
PICOSATÉLITES CANSAT
El concepto cansat (Can-Satellite, por sus siglas en inglés) fue propuesto en 1999 por el profesor Robert Twiggs, del Laboratorio de Desarrollo Espacial de la Universidad de Stanford (Twiggs, 1998). Su principal objetivo era transmitir a los estudiantes los conceptos básicos para el diseño y construcción de satélites.
Un cansat consiste en una plataforma que simula un sistema espacial; en este caso, es un picosatélite que cabe en una lata de refresco.
El conocimiento de estos simuladores se ha difundido en muchos países del mundo, por lo que sus instituciones educativas lo tienen establecido como un modelo complementario para la formación de sus alumnos (Wang y Grande, 2011; Carrasco y Vázquez, 2014; Nylund y Antonsen, 2007), porque a través de su diseño, construcción y pruebas, se les proporcionan los conceptos operacionales de una misión espacial y, en la práctica, estos dispositivos pueden ser utilizados como una herramienta poderosa, si se combinan e integran con instrumentos científicos para realizar experimentos profesionales de mayor envergadura (Colín, 2015).
Los cansat no son puestos en órbita, pero pueden lanzarse a diferentes alturas mediante un cohete, un globo sonda, un avión a escala o un multirotor de control remoto. Para completar su misión, deben ser completa- mente autónomos. Durante su descenso (que puede ser en paracaídas u otro medio), deben transmitir información por telemetría hacia una estación terrena conectada a una computadora portátil. La misión puede consistir únicamente en transmitir datos, efectuar retornos controlados o probar pequeños mecanismos de despliegue. Los cansat se utilizan como una introducción a la tecnología espacial debido al bajo costo, corto tiempo de preparación y la simplicidad de sus diseños, comparados con otros proyectos que pueden resultar largos y costosos.
DESCRIPCIÓN FÍSICA DE UN CANSAT
Los diseños y configuraciones de un cansat son muy variados, ya que dependen sobre todo de las misiones que se realizarán. Como un ejemplo, se describe un prototipo construido en diciembre de 2014, durante un curso patrocinado por la Agencia Espacial Mexicana (2016) en uno de sus proyectos para la formación y capacitación de profesores mexicanos.

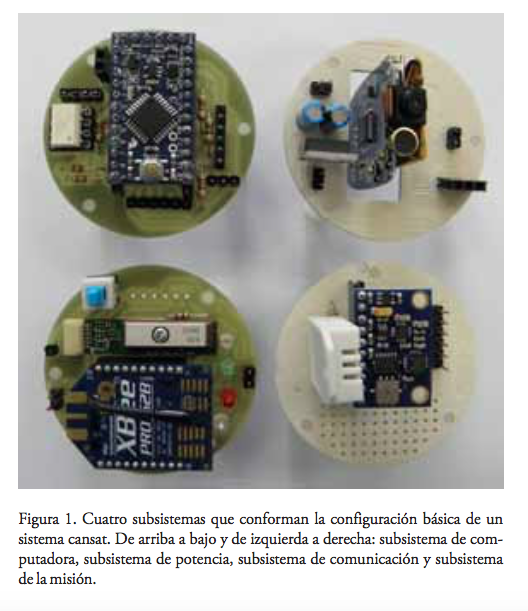
En la figura 1 se muestran los componentes principales que constituyen los subsistemas de un cansat. El subsistema de la computadora de vuelo está compuesto por un microcontrolador Arduino Pro-mini 328, que dispone de un chip Atmega328, operando a 8 MHz. El subsistema de potencia emplea una batería recargable de polímero de litio de 3.7 V, con una capacidad de carga de 1.2 mAh para alimentar todo el sistema. También cuenta con una microcámara 808 Car Key para la grabación de video y captura de fotografía durante el vuelo. Esta cámara tiene una resolución de imagen 720×480 y cuenta con su propia batería. El subsistema de comunicación comprende un módulo transmisor com- puesto de una antena XBee, que utiliza el protocolo de comunicaciones inalámbrico Zigbee (IEEE 802.15.4). El módulo receptor consiste en una antena de características similares, conectada a una computadora portátil que, en conjunto, forman la estación terrena. Además, para conocer su ubicación en todo momento, el cansat tiene instalado un sistema de posicionamiento global o GPS (Global Position System, por sus siglas en inglés) modelo GP635T, cuyas pequeñas dimensiones lo hacen ideal para esta aplicación. Finalmente, el subsistema de la misión cuenta con un sensor de temperatura y humedad DHT11 con salida de datos digital y una tarjeta Arduino que contiene un acelerómetro ADXL345, un giroscopio L3G4200D, un compás HMC5883L y un barómetro BMP085 para medir la presión a diferentes alturas.
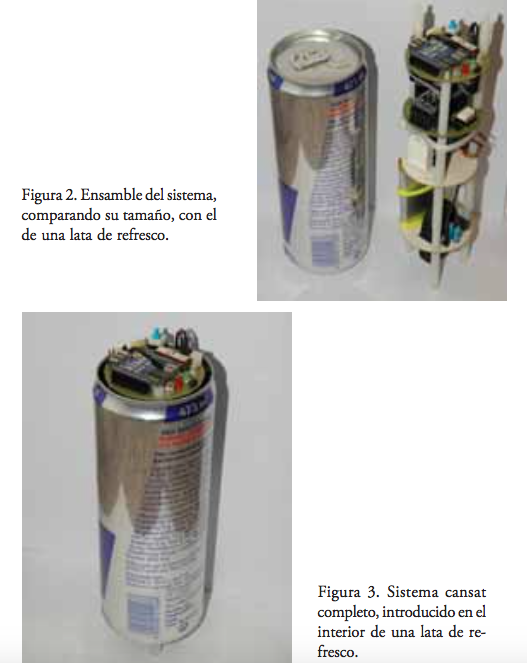
Cada uno de los subsistemas está conectado entre sí para formar todo el sistema, como se muestra en la figura 2, en donde el ensamble es comparado con una lata de refresco. La figura 3 nos muestra el sistema completo, introducido en la lata de refresco.
Se debe tomar en cuenta que el mecanismo de descenso es un elemento adicional, externo al sistema. Un paracaídas, por ejemplo, podría estar sujetado con sus hilos en el aro superior de esta lata.
El lenguaje de programación comúnmente utilizado para este sistema es el Arduino, no sólo porque la configuración de los elementos principales de cada subsistema es compatible con este lenguaje, sino porque es didáctico y relativamente fácil de aprender para los estudiantes. Además, es útil en otras aplicaciones de las carreras de ingeniería.
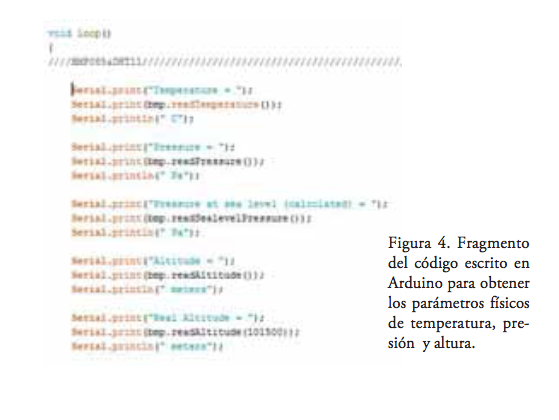
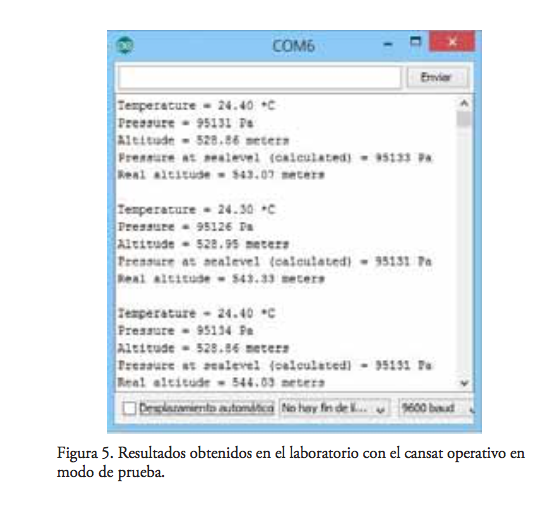
La figura 4 nos muestra un fragmento del código utilizado para medir los parámetros físicos con los sensores DHT11 y BMP085. En estas líneas se da la orden para realizar una lectura y escribirla en la pantalla de la computadora para monitorear el funcionamiento, como puede verse en la figura 5. Cada lectura adquirida es almacenada en un archivo de datos para luego proceder a construir su respectiva gráfica.
Los resultados que se muestran en la figura 5 fueron obtenidos en el laboratorio, debido a que las condiciones ambientales en el exterior no fueron favorables para realizar la práctica de vuelo en la fecha programada.
UN PROGRAMA DE ENTRENAMIENTO PARA LÍDERES EN PICOSATÉLITES CANSAT
En 2011, el Consorcio de Universidades para la Ingeniería del Espacio (University Space Engineering Consortium, UNISEC, por sus siglas en inglés) (UNISEC, 2015), en colaboración con la Universidad de Hokkaido, Japón (Hokkaido University, 2015) comenzaron el programa anual de entrenamiento para la formación de líderes en picosatélites cansat (CanSat Leader Training Program, CLTP, por sus siglas en inglés) (CLTP7, 2015). El principal objetivo de este programa es proporcionar la capacitación a profesores e investigadores de diferentes países, con el fin de extender estos conocimientos en sus lugares de origen y para establecer puntos de contacto y colaboración. Con este programa se pretende que los estudiantes de las instituciones superiores puedan tener acceso y participación en proyectos del espacio. El programa tiene una duración de cuatro semanas. En las dos primeras se imparten los contenidos teóricos vía Internet. Las dos últimas son presenciales para el entrena- miento, en donde los participantes llevan a cabo el ensamble y las pruebas necesarias para la caracterización del modelo o prototipo.
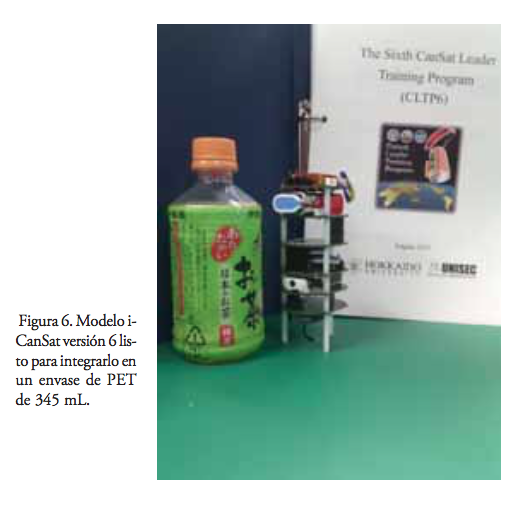
Año tras año, el CLTP presenta nuevos prototipos, como es el caso del modelo i-CanSat versión 6, en el que implementaron una batería alcalina comercial de 9 V, con nuevos componentes electrónicos, poco cableado y la cámara de fotografía que ahora se encuentra integrada en el mismo circuito de la tarjeta PCB. Este modelo también puede ser integrado en un envase de tereftalato de polietileno (polyethylene terephtalate, PET, por sus siglas en inglés), que cumpla con las dimensiones de una lata de refresco. En la figura 6 se muestra el i-CanSat versión 6 y en el fondo se aprecia la carátula del manual de ensamble, en el que se describe todo el procedimiento y las pruebas que se llevaron a cabo durante el sexto programa de entrenamiento, en la ciudad de Sapporo, Japón, en agosto de 2015.
RESULTADOS
Además de las pruebas de funcionamiento y operación que se hicieron durante y después del ensamble, se realizaron dos pruebas complementarias para verificar la operatividad del i-CanSat bajo condiciones extremas: la primera, sometiéndolo a un ambiente de vacío térmico a temperaturas de 0 hasta 40°C durante dos horas y la segunda sobre una mesa vibratoria, sometido a frecuen- cias de 5 a 2000 Hz, con aceleración media de 1.4 G en un lapso de 7 s. Para verificar el despliegue del paracaí- das se realizó una tercera prueba, lanzando el i-CanSat por la ventana de un edificio a una altura de nueve metros.
Todas las pruebas fueron superadas con éxito. Luego procedimos a preparar el lanzamiento mediante un cohete basado en un modelo de papel, diseñado por la empresa Uematsu Electric Co. Ltd., especializada en la fabricación de cohetes profesionales. Este cohete fue armado y ensamblado por cada participante, ya que forma parte del programa de entrenamiento.
En la figura 7 se observa el i-CanSat, antes de ser introducido como elemento de carga del cohete. Se aprecia, también, el momento de despegue en la plataforma, donde es propulsado por un cartucho comercial de propelente sólido.
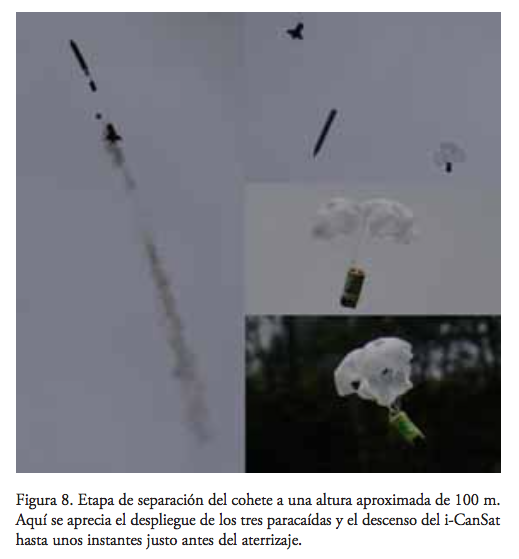
La figura 8 nos muestra el momento de separación del cohete, cuando ha alcanzado su máxima altura (100 m aproximadamente). Se aprecia el despliegue completo de los tres paracaídas y el descenso hasta unos instantes justo antes del aterrizaje.
En la figura 9 se muestran cuatro fotografías tomadas a diferentes alturas durante el descenso. Nótese que el lugar es un área restringida en un campo despejado, con escasa circulación vehicular.


Esta prueba se realizó en las instalaciones de la empresa patrocinadora del cohete, ubicada a unos 100 km fuera de la ciudad.
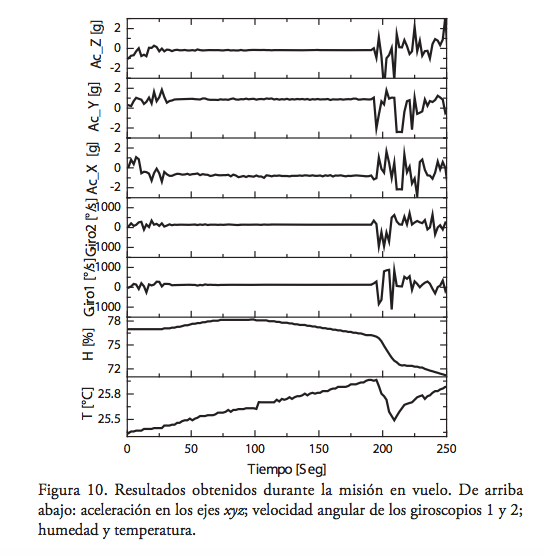
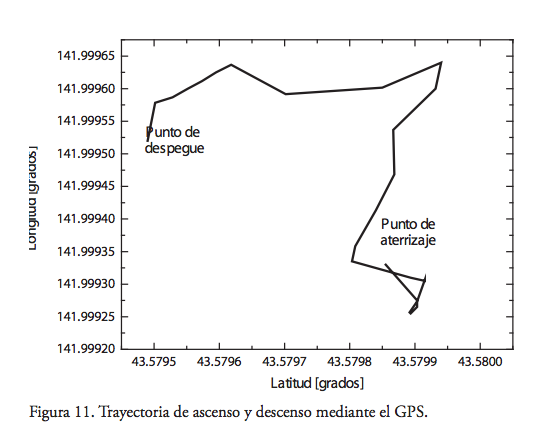
La misión en vuelo tuvo una duración de 250 segundos, contando desde la preparación de la plataforma hasta el punto de aterrizaje. Los resultados obtenidos se muestran en las fotografías de la figura 9 y en las gráficas de las figuras 10 y 11. En estas gráficas se observa un cambio abrupto en las curvas cuando transcurrieron 200 segundos; esto corresponde con el momento de separación del cohete y descenso del i-CanSat.
Durante el descenso, en los últimos 50 segundos, se observa un cambio de temperatura de poco más de medio grado centígrado, lo que nos indica la diferencia de temperaturas entre el interior y el exterior del cohete. En contraste, la humedad mostró una disminución de 5% durante el descenso. Para el acelerómetro se observa una aceleración constante en los ejes xyz durante el ascenso, pero al descender, los cambios son abruptos debido al movimiento del i-CanSat. Lo mismo ocurre con la velocidad angular del giroscopio en uno de sus ejes. Finalmente, toda la trayectoria del ascenso y descenso está proyectada en un área de 50 x 50 m2 con las coordenadas del GPS.
CONCLUSIONES
Los picosatélites educativos cansat están desempeñando un papel muy importante en las instituciones de educación superior de los países que se encuentran en vías de desarrollo. Es evidente que construir pequeños satélites es mucho más barato que hacer dispositivos de grandes dimensiones, destinados a la ciencia o a las comunicaciones; no obstante, el costo de estos pequeños satélites todavía sigue siendo muy elevado para las universidades públicas.
Una manera de afrontar la dificultad presupuestal en materia de educación espacial en nuestro país es abordar este problema utilizando proyectos educativos económicos. Los simuladores de satélite cansat son una buena alternativa, ya que proporcionan los conocimientos básicos y los principios de operación esenciales de una misión espacial. Además, pueden ser diseñados y construidos utilizando componentes electrónicos comerciales; los códigos y la programación pueden hacerse mediante una computadora personal.
La importancia de estos mecanismos es que permiten la integración de pequeños instrumentos en su carga útil. En la práctica, estos dispositivos pueden resultar una herramienta muy poderosa al combinarlos con mecanismos científicos en experimentos profesionales.
Los programas de entrenamiento en picosatélites que se ofrecen en el extranjero, a través de instituciones que cuentan con una trayectoria de experiencia en el sector espacial, nos brindan la oportunidad de traer estos conocimientos para transmitirlos a nuestros estudiantes, con el n de motivarlos a incursionar en este sector educativo.
A la fecha, México cuenta con ocho profesores mexicanos que han obtenido la certificación del CLTP. Tres de ellos (Bárbara Bermúdez Reyes; Ángel Sánchez Colín; Antonio Gómez Roa) forman parte del capítulo UNISEC-Mexico-North (UNISEC-México, 2016), establecido para crear una red nacional e internacional de colaboración entre estudiantes y profesores, en actividades académicas y en proyectos educativos que estén relacionados con el espacio.
AGRADECIMIENTOS
Este trabajo fue nanciado en parte por Promep (pro- yecto DSA/103.5/14/10812), por la Agencia Espacial Mexicana (proyecto Conacyt-AEM-2014-01-248438) y por la Dirección de la Facultad de Ciencias Físico Matemáticas (FCFM-UANL).
El autor agradece al Prof. Tsuyoshi Totani, al Dr. Kim Sangkyun y a los asistentes del CLTP6 por su apoyo durante el entrenamiento.
REFERENCIAS
Agencia Espacial Mexicana. (2016). Consultado el 29 de septiembre de 2016, http://www.educacionespacial.aem.gob.mx/cansat.html
Carrasco D., R. y Vázquez H., S. (2014) Nanosatélite basado en microcontroladores PIC: CanSat, 3er. Congreso Virtual, Microcontoladores y sus aplicaciones, Cuba.
CLTP7. (2015). The 7th CanSat Leader Training Program. Consultado el 20 de noviembre de 2015 http://cltp.info/
Colín, A. (2015). CanSat technology for climate monitoring in small regions at altitudes below 1 km, IAA Climate change & Disaster management. Conference, México City, September 17.
Hokkaido University. (2015). Consultado el 19 de noviembre de 2015, https://www.oia.hokudai.ac.jp/
NASA. (2007). Sputnik and e Dawn of the Space Age. Consultado el 10 de noviembre de 2015, http://history .nasa.gov/sputnik/
Nylund, A., y Antonsen, J. (2007). CanSat–General introduction and educational advantages. Consultado el 20 de noviembre de 2015. https://www.narom.no/wp-content/uploads/2016/08/ CANSAT-General-introduction-and-educational-advantages.pdf
Twiggs R. (1998). University Space System Symposium (USSS), Hawaii, USA.
UNISEC. (2015). e Fourth UNISEC-Global Meeting. Consultado el 19 de noviembre de 2015. http://www.unisec-global.org/
UNISEC-México. (2016). Consultado el 29 de septiembre de 2016, http://www.unisec.mx/#ourteam
Walker, R., et al. (2010). ESA hands-on space education project activities for university students: Attracting and training the next generation of space engineers. IEEE EDUCON Conference, Madrid. Consultado el 19 de noviembre de 2015 http://ieeexplore. ieee.org/stamp/stamp.jsp ?tp=&arnumber=5492406&isnum- ber=5492336
Wang, T., y Grande, J. (2011). e rst European CanSat competition for high school students, Proc. 20th ESA Symposium on European rocket and balloom programmes and related research, Heyré, France, 22-26 May.