Cansat: lata-satélite

Bárbara Bermúdez Reyes*
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016
A partir de 1957 se han lanzado satélites para diversos propósitos –telecomunicación, observaciones, entre otros– (Janson, 2008). Desde entonces, cada vez eran más grandes, robustos y pesados, hasta que, en 1998, al Dr. Twiggs se le ocurrió para la tesis del doctorado de su estudiante, el Dr. Suari, hacer una constelación de satélites pequeños y una nave principal o nodriza para una misión en específico (NASA, 2013). Posteriormente, en Hawai se oficializa, en 1999, el nombre cansat y se autoriza como picosatelite, a la par que se introducen los términos de:
- Minisatélite con masa total de 500-100 kg.
- Microsatélite con masa total de 100- 10 kg.
- Nanosatélite con masa total 1-10 kg.
- Picosatélite con masa máxima total de 1 kg.
Cabe señalar que los términos nano y pico no son similares a las escalas de submicrométricas que se conocen convencionalmente, sino para enfocar peque- ños artefactos a misiones científicas y tecnológicas en aplicaciones espaciales, así como en misiones espaciales, educativas y demostrativas (figura 1).
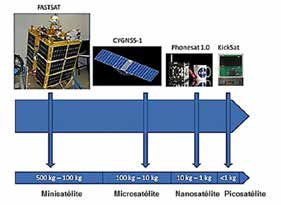
Figura 1. Pequeños satélites (NASA, 2013).
PICOSATÉLITE O CANSAT
El concepto de cansat se concibió cuando se tuvo la necesidad de enseñar a los estudiantes cómo llevar a cabo una misión espacial de bajo costo sin salir al espacio, pero conservando todas las normas y exigencias de diseño, manufactura, pruebas, integración y lanzamiento de una misión espacial. Por lo cual, el profesor Twiggs presentó el concepto de cansat que significa lata-satélite (figura 2), y desde 2002 se clasificó como picosatélite (CLTP4, 2013).

Figura.2. Cansat CIIIA-CLTP4.
DISEÑO DE UN CANSAT
Un cansat debe ser diseñado de acuerdo a una misión en específico. Una misión es un objetivo que se desea alcanzar, por ejemplo, mediciones de temperatura, presión, humedad, campo magnético, obtención de fotografías, vibración, etcétera. Una vez definida la misión se debe definir su ciclo de vida de acuerdo al manual NPR 7120.5, NASA Space Flight Program and Project Management Requirements (NASA, 2012). El ciclo de vida de la misión trata de las fases que componen la misión de principio a fin:
- Prefase: estudio conceptual, producción de ideas y alternativas para llevar a cabo la misión.
- Fase A: desarrollo de conceptos y tecnología, donde se determina la factibilidad y planeación de estrategias para establecer una línea base.
- Fase B: terminación del diseño preliminar y tecnología; define a detalle la misión y establece las necesidades para el desarrollo de la línea base de la misión.
- Fase C: diseño final y fabricación, diseño a detalle del sistema (subsistemas y su operación), fabricación del hardware y codificación del software.
- Fase D: ensamble del sistema, pruebas e integración; se realiza el lanzamiento, ensamble e integración de subsistemas, determinación y requerimientos para pruebas y lanzamiento.
- Fase E: operación y mantenimiento de la misión; identifica las necesidades de operación del sistema, así como las necesidades y condiciones del escenario de la misión.
- Fase F: cierre, análisis de datos obtenidos, conclusiones, presentación de resultados y cierre o transferencia de la misión.
Cabe señalar que cada una de las etapas debe documentarse y estar perfectamente delimitada en cuanto a tiempos y fechas límite. La figura 3 muestra un diagrama en “V”, el cual resume las fases, tiempos, pruebas, documentos, éxitos y ciclo de vida de la misión cansat (CLTP4, 2013).
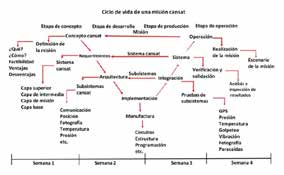
Figura 3. Diagrama en “V” de una misión cansat.
El diagrama en “V” permite conjuntar los requerimientos y los resultados de una misión. Por lo tanto, el diagrama se interpreta de la siguiente manera (CLTP4, 2013).
- El lado izquierdo son las necesidades de la misión.
- El lado derecho es la integración y verificación de la misión.
- La parte media es la manufactura de sistema y la correlación de los requerimientos con la integración.
Una ventaja de este diagrama es que permite optimizar costos, tiempo, minimizar riesgos, garantizar calidad y buen funcionamiento. Indica el inicio y el final del ciclo de vida de la misión, y promueve la comunicación efectiva entre los integrantes del equipo o equipos para terminar una misión con éxito. Cabe señalar que también permite considerar el grado de éxito que se pretende obtener (Dori, 2002).
- Éxito máximo: consiste en lograr la misión completa y un objetivo extra.
- Éxito medio: consiste en lograr la misión completa.
- Éxito mínimo: consiste en lograr al menos la mitad de la misión.

Requerimientos
Los cansat, al igual que los grandes satélites, tienen los siguientes requerimientos (NAROM, 2012):
- Estructurales, dimensiones de la lata que va a llevar el sistema. Tamaño para competencia, lata de 375 mL; dependiendo de la misión, la lata puede ser de aluminio (refresco) ABS o PET. En cuanto a la geometría, generalmente son cilíndricas, pero también las hay hexagonales o estriadas.
- Eléctricas, generalmente el subsistema eléctrico debe ser de 3 V, sin embargo, existen subsistemas de 5 y 6 V.
- Peso máximo, para un cansat es de 1 kg incluyendo sistemas desplegables.
- Desplegables, son estructuras externas como los paracaídas, ala y empenaje, vehículos rover o robóticos.
- Sistemas de lanzamiento, estos sistemas dependen de la altura a la que se llevará a cabo la misión. Los sistemas de lanzamiento que se utilizan son: aeromodelos, multirrotor (drone), cohete, globo meteorológico.
- Sistemas de comunicación, actualmente para los sistemas cansat, la máxima altura a la que llegan es de 10 km. Esto significa que los transmisores y receptores (estación terrena y antenas) deben transmitir en tiempo real todas las mediciones desde la altura que se elija. Lo que implica que se pueden utilizar antenas sencillas como la XBee para alturas de hasta 1km o antenas tipo Jaggi para alturas mayores a 5 km.
- Computadora de a bordo, es el sistema de mando y manejo de datos de todo el cansat.
- Sensores, dispositivos electrónicos que miden magnitudes exteriores (temperatura, presión, vibración, campo magnético, gases, etcétera).
PRUEBAS DE INTEGRACIÓN
Las pruebas de integración se realizan con el cansat o cualquier otro satélite funcionando y la estación terrena recibiendo datos de los sensores; sin embargo, el cansat estará expuesto a ambientes mecánicos y térmicos. Por lo tanto las pruebas de integración tienen el objetivo de probar el sistema de comunicación bajo condiciones mecánicas y térmicas: vibración, golpeteo, aceleración, caída libre, enfriamiento, calentamiento. (Cho et al., 2014; Cho y Masui, 2014). Una vez realizadas estas pruebas con éxito, el cansat está calificado para lanzarse y llevar a cabo la misión.
ACTIVIDADES CANSAT EN EL MUNDO
Actualmente la tecnología cansat es muy conocida y se ha adoptado como parte de los programas de ingeniería, investigaciones y competencias internacionales universitarias. Las competencias más importantes son: ARLISS (EUA), LEEM-UPM (España) y Unisec (Japón) (Sako et al., 2001; LEEM-UPM, 2015; NASA, 2012).
Estas competencias o concursos promueven el trabajo disciplinario e interdisciplinario, es decir, los equipos se conforman de estudiantes de diversas ingenierías –electrónica, aeronáutica, mecatrónica, instrumentación, aeroespacial, comunicaciones, física, etcétera– debido a que existen cuatro categorías (Walker et al., 2010).
1. Telemetría: sistemas de comunicación y recolección de datos en tiempo real durante descenso con paracaídas.
2. Comeback: telemetría y retorno del cansat en un vehículo tipo rover al punto de partida.
3. Flyback: telemetría y retorno del cansat mediante el despliegue de ala y empenaje o parapente al punto de partida.
4. Openclass: telemetría, misión adicional. Llevada a cabo con un sistema robótico y regreso a un punto en específico.
Además, en 2003 se formó el University Space Engineening Consortium (Unisec) en Japón, éste engloba a las universidades que realizan actividades aeroespaciales y espaciales del mundo. Lo que facilita la colaboración e intercambio entre las universidades a nivel mundial mediante cursos de entrenamiento cansat como el Cansat Leader Training Program (CLTP) y capítulos universitarios (Sahara y Ando, 2013). Cabe señalar que se cuenta con el capítulo Unisec-México desde 2014.
ACTIVIDADES CANSAT EN MÉXICO
Las actividades cansat en México comenzaron en 2008 en la Universidad Autónoma de México mediante la Red Universitaria del Espacio (RUE) (AEM, 2015). Posteriormente, al formarse la Agencia Espacial Mexicana, en 2013, facilitó trámites administrativos para que profesores mexicanos tomaran el Cansat Leader Training Program 4 (CLTP4). En el cual, una profesora de la FIME-UANL fue elegida de entre 28 profesores a nivel mundial. Cabe señalar que de 2013 a 2015, tres profesores de la UANL han asistido a este programa de entrenamiento cansat (dos de FIME y uno de la FCFM). También se han llevado a cabo cursos de entrenamiento cansat para profesores y estudiantes en México: dos en la Universidad Autónoma de Baja California, uno en el Instituto Tecnológico de Nogales, uno en la Universidad Autónoma de Nuevo León, entre otros. En 2015 se llevó a cabo el Primer Concurso Nacional del Cansats (Sánchez et al. 2016), en Tijuana, B.C., el cual fue organizado por un comité de profesores de distintas universidades del país, siendo la sede en la Universidad Autónoma de Baja California. En este concurso, la UANL participó con el Mty-Sat (figura 4), construido por un equipo de cuatro estudiantes: Graciela Stephanie Espinosa Morales (ingeniería en aeronáutica), José Ángel Cardona Alanís (ingeniería en electrónica y comunicaciones), Gerardo Antonio Lira Ibarra (ingeniería mecatrónica), Antonio Emmanuel Rentería Rodríguez (ingeniería mecatrónica).

Figura 4. Integrantes del equipo del Mty-Sat.
El 8 de octubre de 2016 se celebrará el Segundo Concurso Nacional de Cansats, en Nuevo León, organizado por la FIME y la FCFM. En este 2° concurso se evaluarán las categorías de telemetría y comeback.
CONCLUSIONES
La miniaturización de dispositivos espaciales es una realidad que permite acceder a tecnología espacial. Esto implica enseñar y entrenar a los estudiantes y profesores mediante sistemas de bajo costo como los cansats. Estos picosatélites no son exclusivos para los estudiantes del área aeroespacial, sino que promueven las actividades en equipos disciplinarios y multidisciplinarios. Además, son útiles en aplicaciones para resolver problemas específicos de electrónica y comunicaciones, inclusive en física, por ejemplo, en el cálculo de trayectorias, mecánica orbital, etcétera o en temas de aeronáutica como el diseño y cálculo de paracaídas, diseño y construcción de cohetes, aeromodelos y drones. Asimismo, en aplicación de mecánica y procesamiento de materiales. Estos dispositivos permiten simular misiones espaciales e impulsan el trabajo colaborativo entre profesores y estudiantes de diversas instituciones.
AGRADECIMIENTOS
Se agradece a la Red Temática Nacional de Ciencia y Tecnología del Espacio (Redcyte), por las facilidades para la realización de las actividades cansat en Nuevo León. Así como a Unisec Global por el apoyo para la formación y consolidación del Capítulo Unisec México.
* Universidad Autónoma de Nuevo León.
Contacto: barbara.bermudezry@uanl.edu.mx
REFERENCIAS
Agencia Espacial Mexicana. (2015). Kit cansat. México: Red Universitaria del Espacio. Universidad Nacional Autónoma de México.
Cho, M., Masui, H., y Hatamura. T.(2014). Satellite Testing Tutorial: Mechanical Test. Laboratory of Space environment Interaction Engineering. Japón: Kyushu Institute of Technology.
Cho, M. y Masui H. (2014). Satellite Testing Tutorial: Thermal Test. Laboratory of Space environment Interaction Engineering. Meisenkai: Kyushu Institute of Technology.
CLTP4. (2013). Cansat Leader Training Program 4. Kanagawa: Keio University and University Space Engineering Corsotium. Disponible en http://cltp.info/pdf/CLTP4%202nd%20 ann_v0222.pdf
Dori, D. (2002). Object Process Methodology. A Holistic System Paradigm. Cambridge: Springer.
Janson, S.W. (2008). The History of Small Satellites, in Helvajian, H., y Janson, S.W. (eds.) Small Satellites: Past Present and Future. California: The Aerospace Press.
LEEM-UPM. (2015). International Cansat Competition. Disponible en http://upm.leem.es/proyectos/cansat/
NAROM. (2012). The Cansat Book. Noruega: Norwegian Centre for Space Related Education.
Sako, N., et al. (2001). Cansat suborbital Launch ExperimentUniversity Educational Space using picosatellite. Acta Astronáutica, vol. 48, No. 15. 5-12 pp.767-776.
NASA. (2012). Space Flight Program and Project Management Requirements. National Aeronautics and Space Administration, California. Technical TP-2014-216648. NPR 7120.5. Disponible en http://nodis3. gsfc.nasa.gov/npg_img/N_ PR_7120_005E_/N_PR _7120_005E_.pdf
NASA. (2013). University Student Launch Initiative. Student Launch Project National Aeronautics and Space Administration. Disponible en http://www.nasa.gov/audience/forstudents/ studentlaunch/home/index.htm
NASA. (2014). Small Spacecraft Technology State of the Art. National Aeronautics and Space Administration, California. Technical TP-2014-216648. Disponible en http://www.nasa.gov/sites/ default/files/atoms/files/small_spacecraft_technology_state_ of_the_art_2015_tagged.pdf
Sahara, H. y Ando E. (2013). CanSat Leader Training Program (CLTP). Disponible en http://cltp.info/pdf/121010-13Sahara_ Ando_CLTP3 _Report_Full Paper.pdf
Sánchez, Á.E., et al. (2016). Picosatélites educativos cansat: Primer Concurso Nacional en México. Celerinet, año IV, vol. VII, enero-junio.
Walker, R., et al. (2010). ESA Hands-On Space Education Project Activities for University: Attracting and Training Next Generation of Space Engineers. Disponible en http://www.academia. edu/19276543/ESA_hands-on_space_education_project_ activities_for_university_stude nts_Attracting_and_training_ the_ next_generation_ of_space_engineers