Monitoreo y control en LabView de un exoesqueleto de aumento de fuerza en la articulación del codo
Fermín Castillo-Anaya* ORCID: 000-0001-8893-5086
Manuel Jimenez-Lizarraga* ORCID: 000-0002-1071-220X
Antonio Osorio-Cordero** ORCID: 000-0001-8803-945X
CIENCIA UANL / AÑO 27, No.127, septiembre-octubre 2024
RESUMEN
El objetivo principal de este artículo es el monitoreo y control en tiempo real de las articulaciones de un exoesqueleto desarrollado mediante la programación por flujo de datos utilizando LabView. Se construyó un panel de monitoreo y control, el cual consiste en la interconexión de bloques de control y visualización gráfica. De esta manera, la interacción humano-máquina se torna más intuitiva y segura. Se emplea una tarjeta MyRIO, destacada por su alta capacidad de procesamiento de cálculos y gráficos, permitiendo el procesamiento y filtrado eficiente de señales analógicas y digitales. Se incluye una ley de control subóptima programada en LabView.
Palabras clave: LabView, control, panel de monitoreo, exoesqueleto, procesamiento.
ABSTRACT
The main goal of this article is to present the real-time monitoring and control of an exos- keleton’s joints, developed through data flow programming using LabView. A monitoring and control panel consisting of the interconnection of control blocks and graphical visualization was de- veloped. In this way, human-machine interaction becomesmore intuitive and safer. A MyRIO card is employed, renowned for its high processing capacity for calculations and graphics, allowing for the efficient processing and filtering of analog and digital signals. A suboptimal control law is also programmed in LabView.
Keywords: LabView, exoskeleton, monitoring panel, processing, control.
Los sistemas de control industriales seguidos en tiempo real presentan características de alto riesgo, por lo que al vigilarlos a distancia y con la interpretación constante del operario, se determinan las condiciones mecánicas, hidráulicas, eléctricas, presión y temperatura, previniendo riesgos y fallas. Este tipo de monitoreo se denomina sistema SCADA, el cual consiste en supervisar, regular y adquirir datos en tiempo real. Es una herramienta indispensable en la automatización y vigilancia de procesos industriales modernos. La incorporación del software LabView en la creación de estas redes es muy compleja pero eficaz. Nos permite manipular y diseñar el panel de observación dependiendo de nuestras necesidades. Castillo et al. (2019) presentan el modelo matemático, diseño y el análisis del control subóptimo del exoesqueleto, el cual garantiza la optimización del consumo energético. Cabe mencionar que puede ser supervisado desde un punto remoto.
LabView permite el uso de varios instrumentos visuales y de programación, los cuales pueden ser utilizados como un laboratorio virtual. De esta manera se realiza una comunicación para la inspección a distancia mediante una herramienta de WebPager, así como los instrumentos básicos que esta plataforma proporciona a sus desarrolladores (Titov et al., 2013). Una aplicación, por ejemplo, en el campo de las energías renovables, es el continuo monitoreo de paneles solares. Mediante la interfaz en tiempo real se visualiza el suministro de la energía obtenida por la radiación solar y el consumo energético del usuario. Esto ayuda a aumentar el rendimiento óptimo en el sistema, regulándolo de forma local o remota (Khuwaja et al., 2015).
Las aplicaciones de LabView pueden expandirse de manera tal que no sólo se vigila el sistema, sino que también se controla. Una aplicación típica de éste se enfoca en controlar la velocidad de un motor de corriente continua, aplicando un controlador proporcional integral y derivativo (PID). La velocidad del motor es obtenida por un decodificador óptico y es transformada proporcionalmente al voltaje mediante señales PWM. Este sistema es analizado por varios experimentos que validan la interfaz gráfica y el control (Gasparesc, 2016). Este último también es utilizado en diferentes entornos industriales para controlar la velocidad, posición, temperatura, vibraciones de un motor de alta potencia de manera remota, donde se deben observar continuamente su funcionamiento óptimo y las condiciones del área de trabajo. Por lo tanto, la plataforma LabView, mediante el monitoreo a distancia, disminuye accidentes en lugares de alto riesgo (Magdum et al., 2016).
En el área académica, LabView se ha utilizado en la creación de varias interfaces de comunicación con otros programas, incorporando análisis de datos, procesamiento de señales, visión artificial y control. Por lo que la interfaz de comunicación con el software Matlab ofrece cálculos matemáticos, simulaciones de distintos controladores basados en el modelo matemático y programación dinámica, dando como resultado una interpretación gráfica e intuitiva de los modelos robóticos analizados (Cansalar et al., 2015).
En el campo de la medicina también se ha implementado a un nivel cerebral, donde la detección del estrés mental mediante la adquisición y procesamiento de señales EEG y EOG son analizadas con el objetivo de disminuir el estrés y la fatiga en el paciente (Roy et al., 2014). La unión entre la robótica y la medicina se aplica en la rehabilitación de articulaciones o músculos del cuerpo humano. Por lo que obliga a la robótica a diseñar y controlar prótesis más sofisticadas, de tal manera que el monitoreo en tiempo real es esencial. Estas interfaces se realizan mediante una tarjeta de adquisición de datos y la plataforma LabView.
La prótesis de rehabilitación realizada por Shuxiang et al. (2017) tiene un panel de control y monitoreo, el cual permite observar qué movimiento del brazo o antebrazo se está realizando, los grados de flexión y extensión de la articulación del codo y su velocidad de movimiento. Un exoesqueleto para la articulación del codo controlado por señales EMG utiliza una interfaz de vigilancia y programación por flujo de datos en el entorno de LabView. Aunque la plataforma experimental es de bajo costo, es eficiente, dando resultados gráficos en tiempo real sobre el comportamiento del bíceps y tríceps del cuerpo humano (Krasin et al., 2015).
En este artículo se presenta un sistema de monitoreo local y a distancia en tiempo real, con un exoesqueleto de aumento de fuerza en la articulación del codo. Esto con el objetivo de observar el comportamiento de los sensores y actuadores del mismo. La adquisición de datos es a través de la tarjeta MyRIO, la cual tiene un procesador A4, múltiples entradas y salidas analógicas y digitales. La programación es por flujo de datos en LabView. Esto nos permite observar cada línea de programación y rendimiento. También se presentan pruebas experimentales del sistema híbrido y de cada actuador que lo compone.
FUNCIONAMIENTO DEL SISTEMA
Control del exoesqueleto
La plataforma del exoesqueleto consiste en un sistema híbrido que es básicamente la combinación de dos tipos de actuadores: los músculos artificiales y los motores eléctricos funcionando de manera síncrona, de esta manera se aumenta la fuerza en la articulación del codo. El objetivo es optimizar el consumo energético del sistema eléctrico y neumático para proporcionar más tiempo de autonomía, así como regular la posición. También tiene válvulas neumáticas de alta frecuencia que permiten regular el caudal de aire ingresado en cada actuador. En la retroalimentación de la posición se utilizan encoders incrementales, los cuales generan pulsos digitales que generan la posición angular en la articulación del codo. En la figura 1 se observa la instrumentación, así como el diagrama de cuerpo libre que pertenece a la estructura mecánica del exoesqueleto.
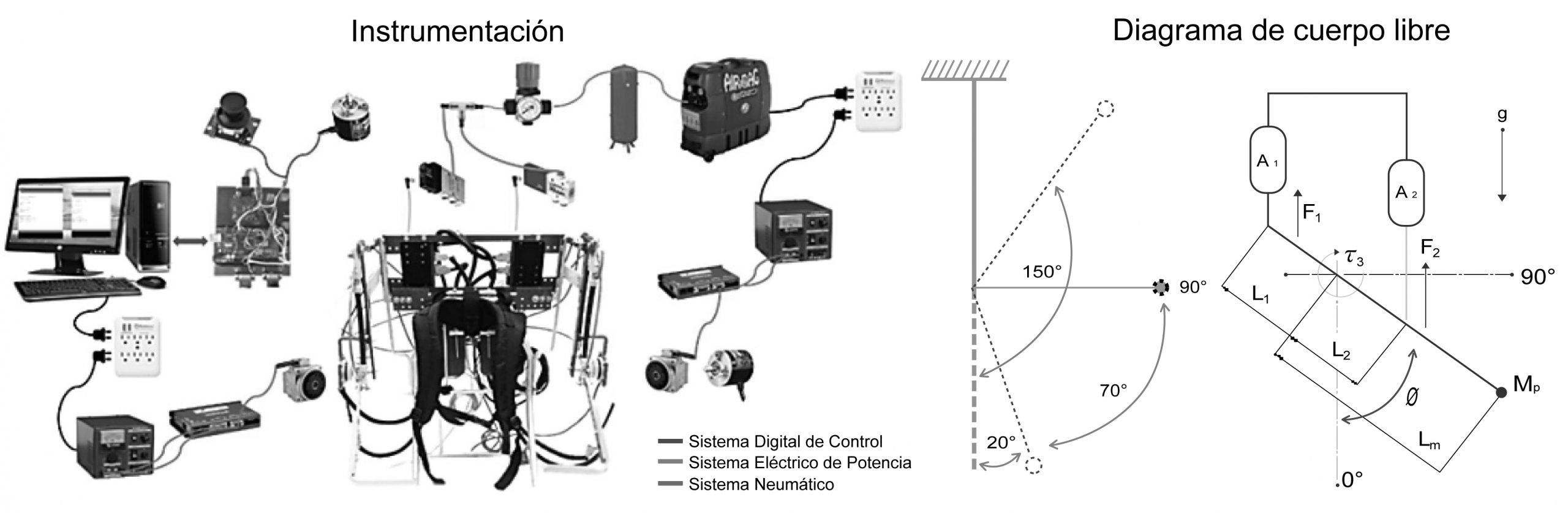
Figura 1. Instrumentación y diagrama de cuerpo libre del exoesqueleto para aumento de fuerza en la articulación del codo.
El exoesqueleto tiene tres leyes de control, dos para los músculos artificiales y una para el motor eléctrico. Los actuadores neumáticos funcionan de manera antagonista, como el bíceps y el tríceps del cuerpo humano, mientras que el motor funciona sin interrupciones, es decir, en el movimiento de flexión y extensión en la articulación del codo. Con el fin de validar el funcionamiento del sistema híbrido se realizaron pruebas experimentales con cada actuador de forma individual. Las gráficas del comportamien- to de cada actuador se observan en la figura 2.
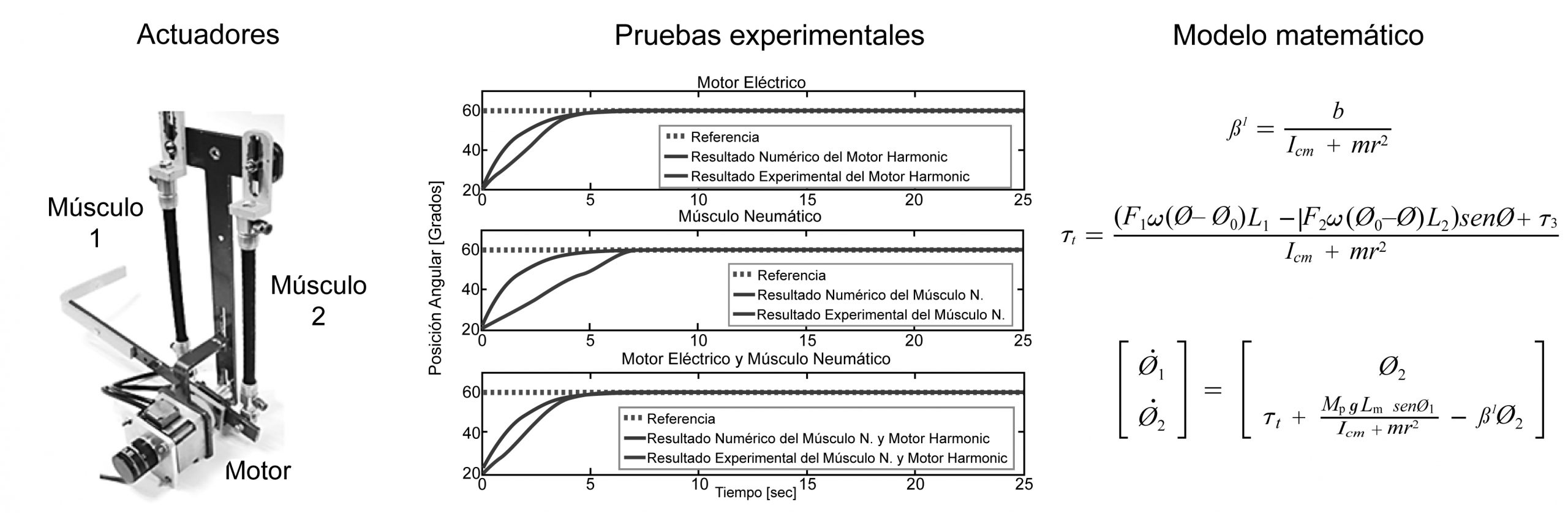
Figura 2. Actuadores del codo, validación del sistema híbrido y modelo matemático del exoesqueleto para aumento de fuerza.
Es notable cómo al unir dos actuadores diferentes el comportamiento del sistema cambia. Los músculos artificiales generan 70% de la fuerza al realizar los movimientos de flexión y extensión y el motor eléctrico 30% restante. De esta forma se pueden levantar 24 kg entre las dos extremidades del exoesqueleto. Para validar el control subóptimo se realizaron simulaciones basadas en cálculos matemáticos. Esta ley propuesta por Santos et al. (2016) garantiza por un índice de desempeño la optimización de energía. En la figura 3 se observa la posición en cada una de las articulaciones del exoesqueleto iniciando en 20°, alcanzando una posición de 70° en extensión y regresando a su posición inicial de 20°, también se visualiza la señal del control, así como la ley de control subóptimo.
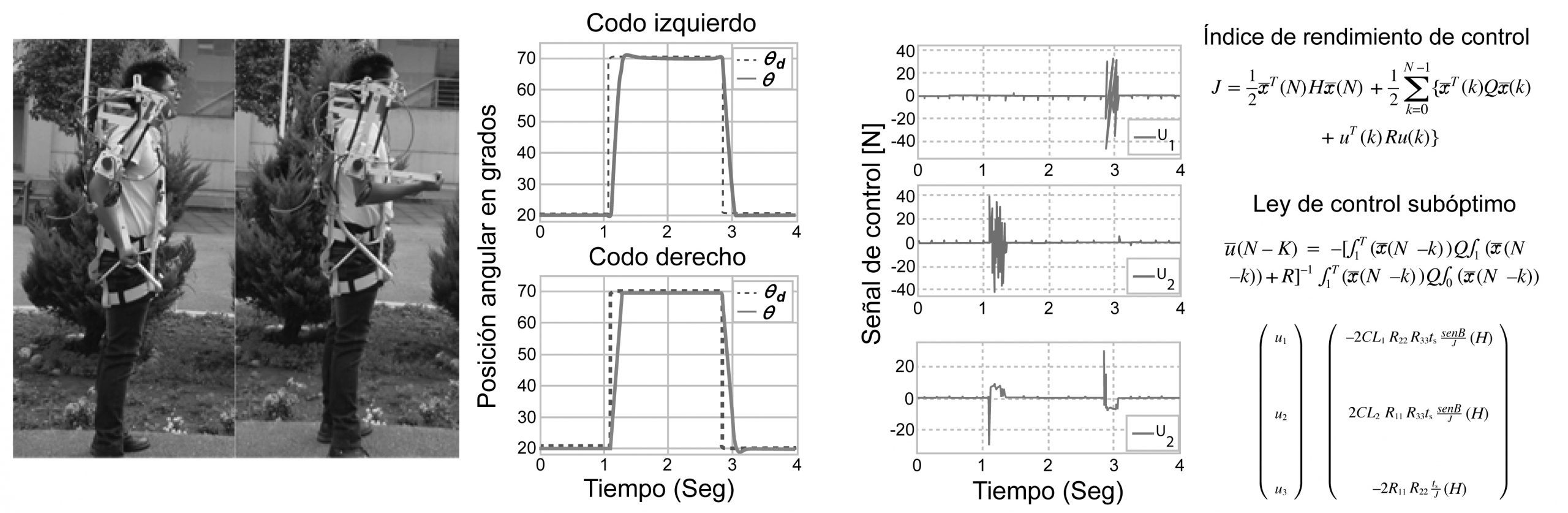
Figura 3. Simulación y ley de control subóptimo para posicionar la articulación del codo a 70°.
APLICACIONES PRÁCTICAS
Monitoreo del exoesqueleto
El exoesqueleto está vigilado en tiempo real, por lo que el diseño y la programación se realizaron en la plataforma LabView de NI National Instruments. El panel de control y monitoreo se divide en dos secciones: la primera se visualiza en la figura 4, donde se observa la posición mediante un tacómetro digital llamado joystick, el botón de emergencia, el sistema de energía para las válvulas neumáticas, la energía de los motores, el funcionamiento neumático, el sistema numérico de control, el cual indica la posición angular, las matrices de penalización del control (Q-R) que garantizan la estabilidad y, finalmente, el sistema de vigilancia y adquisición a distancia del exoesqueleto.
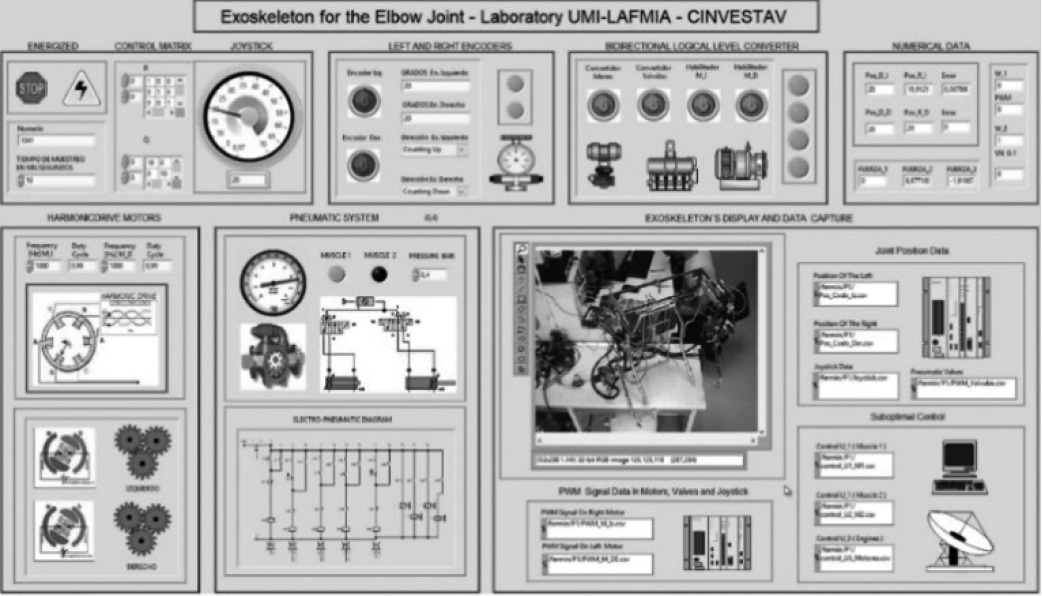
Figura 4. Panel de mandos del sistema eléctrico, neumático y almacenamiento de datos a distancia.
En la figura 5 se visualiza la segunda sección del panel de monitoreo, donde se indican las gráficas de la posición angular correspondientes a la flexión y extensión del codo. Éstas son de color rojo y azul indicando el seguimiento de trayectoria en la articulación del codo. Las gráficas azules proporcionan información sobre la velocidad angular de cada una de las articulaciones, mientras que las rojas son las tres señales de control subóptimo de los músculos neumáticos y el motor eléctrico.
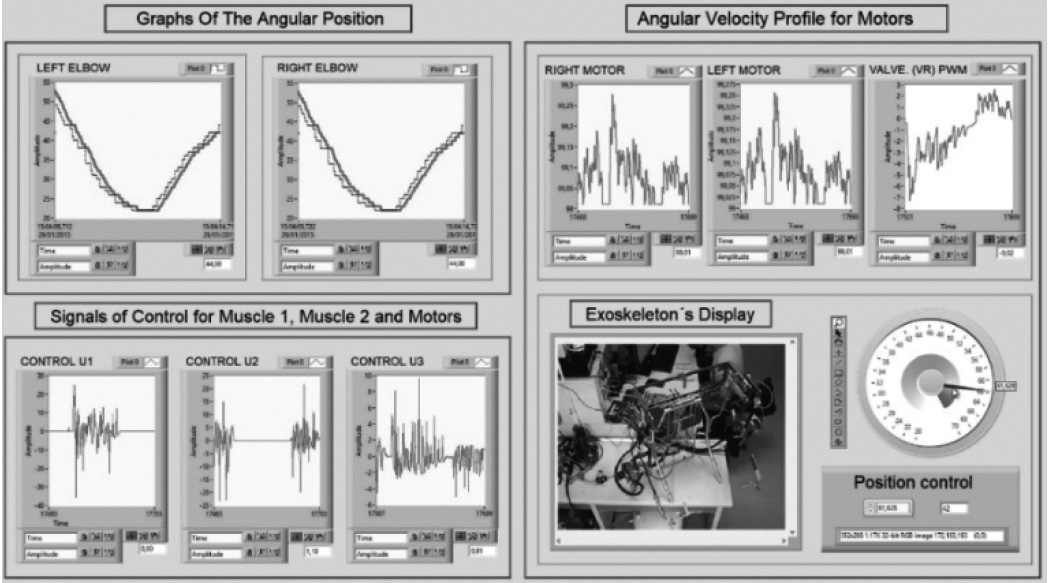
Figura 5. Panel de visualización para las señales de control, posición y velocidad angular.
La programación es por flujo de datos; la interconexión, por medio de bloques y de instrumentos digitales (figura 6). En este tipo de programación, cada color indica un tipo de dato establecido por LabView. Las estructuras utilizadas son similares a las del código C++. Cabe mencionar que es posible visualizar el monitoreo desde un panel a distancia sin afectar los movimientos del exoesqueleto.
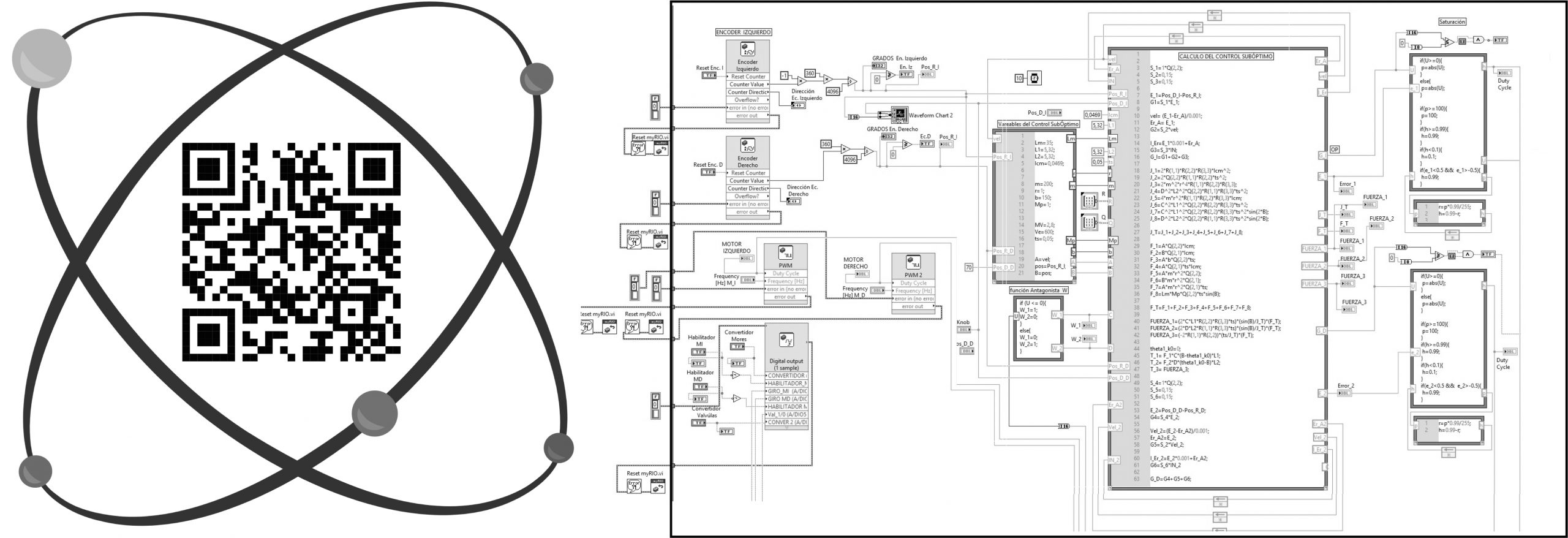
Figura 6. Programación por flujo de datos en LabView para el monitoreo y mando de un exoesqueleto.
La programación del exoesqueleto consiste en un controlador subóptimo. El primer y segundo mandos son para los músculos neumáticos que funcionan de forma antagonista, y el tercero del motor eléctrico que funciona continuamente. Por lo tanto, el ahorro energético se observa confrontando este controlador contra uno PD+g, que interviene simultáneamente los tres actuadores. En la figura 7 se observa una gráfica de cotejo del incremento de fuerza, así como las del control subóptimo, las cuales tienen una energía máxima de 50 N, en comparación con el PD+g, que tiene 250 N. Esto concluye que el controlador propuesto disminuye el gasto energético, aumentando la autonomía y fuerza del exoesqueleto.
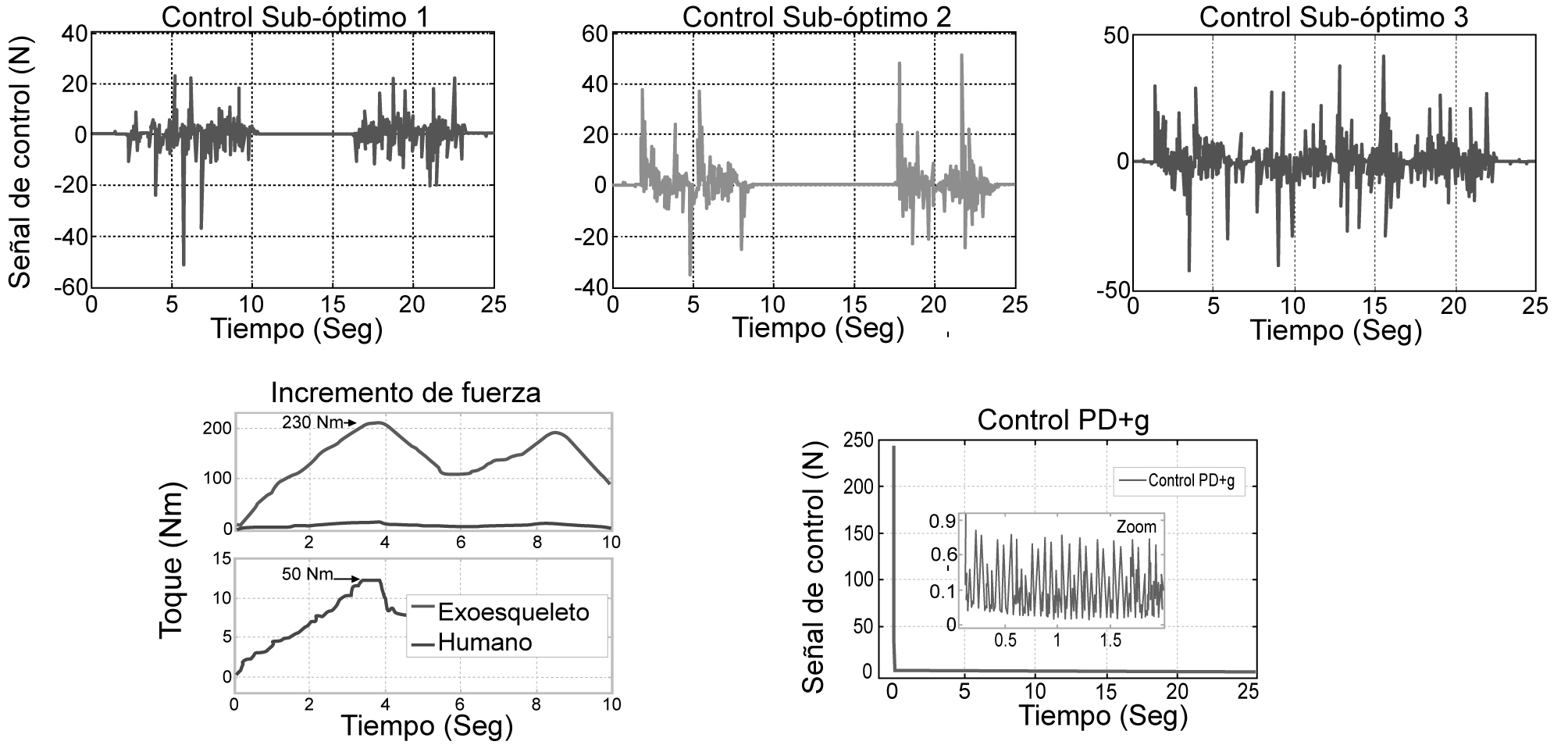
Figura 7. Resultados experimentales del ahorro energético en el exoesqueleto.
Resultados del ahorro energético del exoesqueleto
La programación realizada para el panel de monitoreo en tiempo real funciona perfectamente. Las señales de adquisición de datos son filtradas y analizadas en la tarjeta MyRIO. El acoplamiento de la etapa de potencia con la digital es preciso, así como la conexión remota; aunque existe un retardo en la actualización de datos, esto depende del servicio de Internet que se utiliza. El sistema híbrido, que consiste en la combinación del actuador neumático con el motor lineal, funciona correctamente auxiliando al músculo bíceps y tríceps del cuerpo humano. La ley de control garantiza un ahorro energético y es estable ante las perturbaciones externas. Una de las áreas de investigación es la robótica aplicada a sistemas autónomos en exoesqueletos para la rehabilitación y aumento de carga, lo que extiende un amplio campo de aplicaciones en el área industrial y médica.
AGRADECIMIENTOS
Agradecemos a la Universidad Autónoma de Nuevo León; gracias al Proyecto ProACTI, con clave 141-IDT-2023, se alcanzaron los objetivos y metas de este proyecto. Así como la colaboración de investigadores del Centro de Investigación y de Estudios Avanzados del Instituto Politécnico Nacional del Laboratorio Franco Mexicano UMI-LAFMIA.
* Universidad Autónoma de Nuevo León, San Nicolás de los Garza, México. ** CINVESTAV-Instituto Politécnico Nacional, Ciudad de México, México.
Contacto: fer_castillo3103@hotmail.com
REFERENCIAS
Cansalar, C.A., Maviş, E., et al. (2015). Simulation time analysis of MATLAB/Simulink and LabView for control applications, In International Conference on Industrial Technology, 470-473.
Castillo, F., López-Gutierrez, R., et al. (2019). Finite Horizon Nonlinear Energy Optimizing Control in a Force Augmenting Hybrid Exoskeleton for the Elbow Joint, IEEE Transactions on Control Systems Technology, 2681-2688.
Gaşparesc, G. (2016). PID control of a DC motor using Labview Interface for Embedded Platforms, IEEE International Symposium on Electronics and Telecommunications, 145-148.
Khuwaja, A. A., y Sattar, A. (2015). Solar power remote monitoring and controlling using Arduino, LabView and web browser, IEEE Power Generation System and Renewable Energy Technologies, 1-4.
Krasin, V., Gandhi, V., et al. (2015). EMG based elbow joint powered exoskeleton for biceps brachii strength augmentation, In International Joint Conference on Neural Networks, 1-6.
Magdum, A., y Agashe, A. (2016). Monitoring and controlling the industrial motor parameters remotely using LabView, IEEE International Conference on Recent Trends in Electronics, Information, 189-193.
Roy, J.K., Das, A., Dutta, D., et al. (2014). Intelligent Stress-Buster-A LabView based realtime embedded system for thought control using brain computer interface, India Conference Annual IEEE, 1-5.
Santos Sánchez, Omar, García, O., Romero, H., et al. (2016). Finite horizon nonlinear optimal control for a quadrotor: experimental results, Optimal Control Applications and Methods, 54-80.
Shuxiang, G., Jian, G., Nan, L. (2017). The Labview-Based control system for the Upper Limb Rehabilitation Robot, International Conference on Mechatronics and Automation, 6-9.
Titov, I., y Titov, E. (2013). Labicom. Net-Putting your laboratory online in less than five minutes with WebPager too. Automatic generation and real-time control of a LabView based laboratory server from pluginless HTML, Experimental International Conference IEEE, 180-1183.
Recibido: 12/02/2024
Aceptado: 28/06/2024