De robots, neuronas y energía
LUIS ENRIQUE GÓMEZ VANEGAS*
CIENCIA UANL / AÑO 26, No.121, septiembre-octubre 2023
Hace muchos años, en los dibujos animados, veíamos a algunos personajes enfundarse en trajes metálicos con forma de robot, en ese entonces creíamos tan lejano el día en que esa tecnología fuera realidad, pues bien, los exoesqueletos militares han dejado de ser una fantasía para convertirse en una realidad cada vez más tangible. Estos increíbles avances tecnológicos están transformando la forma en que los soldados enfrentan los desafíos físicos y operativos en el campo de batalla.
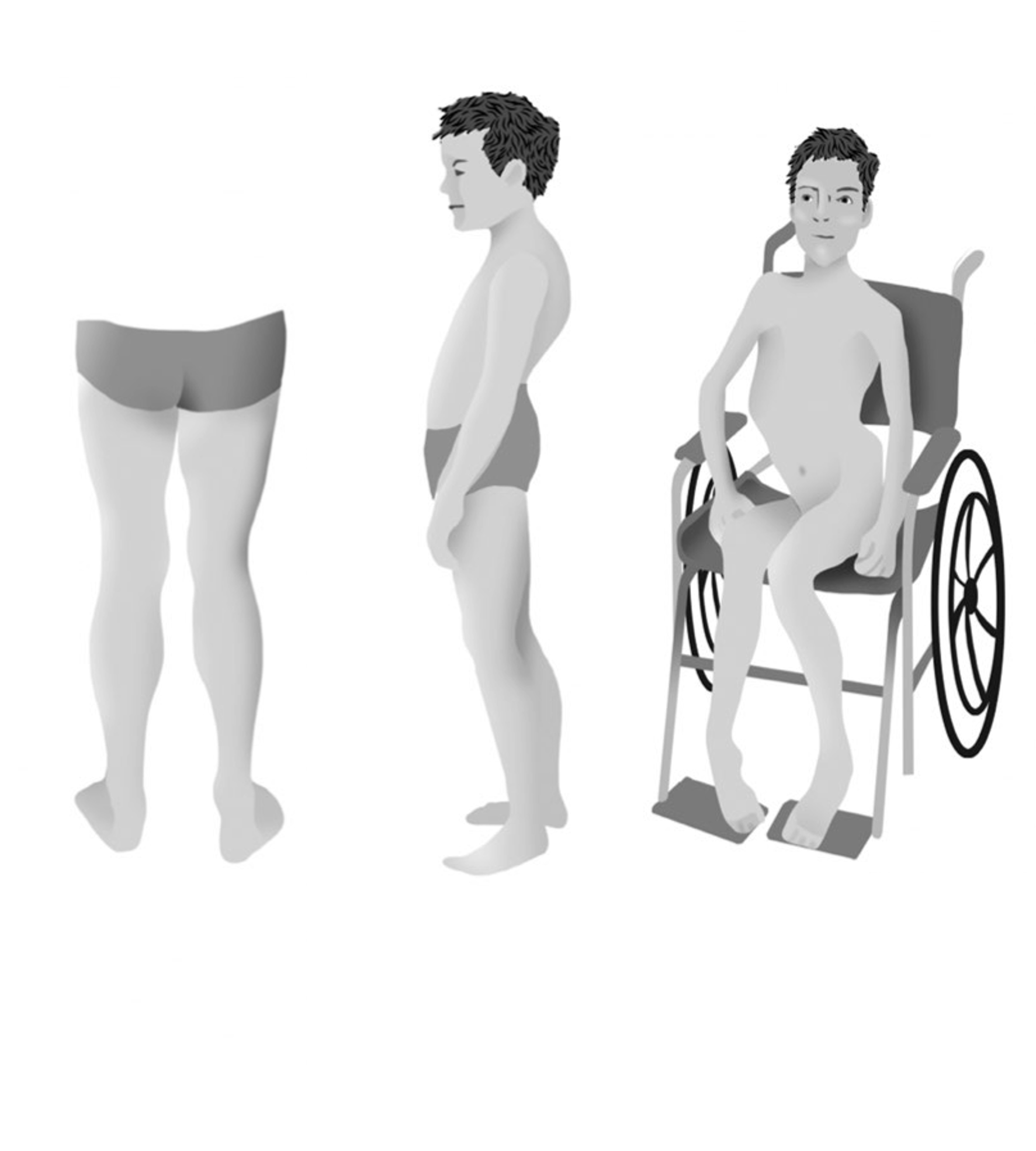
Pero no sólo en el ámbito militar, déjame contarte sobre la distrofia muscular de Duchenne, que afecta a casi cinco de cada 100,000, en su mayoría, niños varones, al ser una enfermedad ligada al cromosoma X. Esta afección se caracteriza por causar debilidad y fatiga muscular, falta de estabilidad al caminar, complicaciones cardíacas y respiratorias, especialmente en edades adultas. Lo que conduce al confinamiento de los infantes a sillas de ruedas desde edades muy tempranas. Al ser considerada una enfermedad sin cura, los esfuerzos se enfocan en preservar la autonomía del paciente el mayor tiempo posible. En este sentido, la terapia física es la mejor herramienta para ralentizar la distrofia muscular.
Ante la falta de herramientas tecnológicas adecuadas para llevar a cabo la terapia, unos investigadores de la Universidad Politécnica de Madrid (UPM) y de la Universidad de San Buenaventura (USB), en Colombia, han ideado el diseño mecánico, electrónico y de sistemas de control de un exoesqueleto robótico que permitiría automatizar los procesos de terapia física de estos pacientes. Esta tecnología tiene el objetivo de servir de apoyo al personal médico a la hora de ejecutar procesos de terapia con menor fatiga física, mayor repetibilidad y con una mejor evaluación del progreso del paciente.
Para el diseño de la ingeniería de este ingenio y el estudio de su rendimiento, los expertos han utilizado un modelo híbrido dinámico-matemático del mismo y el cuerpo de un niño según la antropometría de una población de niños de seis años. Las simulaciones numéricas han validado el rendimiento y la robustez del sistema. Futuras investigaciones se enfocarán en la evaluación clínica del exosqueleto, lo cual dará evidencias del impacto positivo que puede tener el uso de esta tecnología sobre la calidad de vida de los niños con distrofia muscular de Duchenne.
Los especialistas exponen los detalles técnicos en la revista académica Applied Sciences, bajo el título “Mechatronics Design of a Gait-Assistance Exoskeleton for Therapy of Children with Duchenne Muscular Dystrophy” (Fuente: UPM).
Y ya que hablamos de parecidos a robots, déjame contarte sobre el pangolín, un animal llamativo, que parece una piña de pino andante, el único mamífero completamente cubierto de escamas duras. Éstas están hechas de queratina, igual que nuestro pelo y nuestras uñas. Las escamas se superponen y están directamente conectadas a la capa de piel blanda subyacente. Esta disposición especial les permite hacerse un ovillo en caso de peligro, protegiendo así sus partes blandas y dejando al descubierto sólo las partes duras.
Basados en estas características, un equipo del Instituto Max Planck de Sistemas Inteligentes en Alemania, ha diseñado un robot metálico pero flexible. Los diseñadores, quienes exponen los detalles técnicos de su robot en Nature Communications, bajo el título “Pangolin-inspired untethered magnetic robot for on-demand biomedical heating applications”, tomaron al animal como modelo y desarrollaron un robot flexible hecho de componentes blandos y duros que, al igual que el pangolín, se convierte en una esfera en un abrir y cerrar de ojos, con la característica adicional que puede emitir calor cuando sea necesario.
El nuevo robot no mide más de dos centímetros y consta de dos capas: una blanda, hecha de un polímero tachonado de pequeñas partículas magnéticas, y otra dura, de componentes metálicos dispuestos en capas superpuestas. Así, aunque está hecho de piezas metálicas sólidas, sigue siendo flexible y lo bastante blando para su uso dentro del cuerpo humano.
Cuando se expone a un campo magnético de baja frecuencia, el usuario puede enrollarlo y moverlo en más de una dirección. Las piezas metálicas sobresalen como las escamas del animal, sin dañar ningún tejido circundante. Una vez enrollado, puede transportar pequeñas cargas, por ejemplo, dosis de medicamentos. La idea es que un robot de esta clase pueda viajar algún día por dentro del aparato digestivo humano y realizar tratamientos médicos en puntos específicos.
No depender de cables o tubitos desplegados desde el exterior, poder moverse intracorporalmente, estar hecho de piezas duras y ser capaz de emitir calor, sitúan a este robot en un puesto privilegiado dentro de la robótica médica (fuente: NCYT).
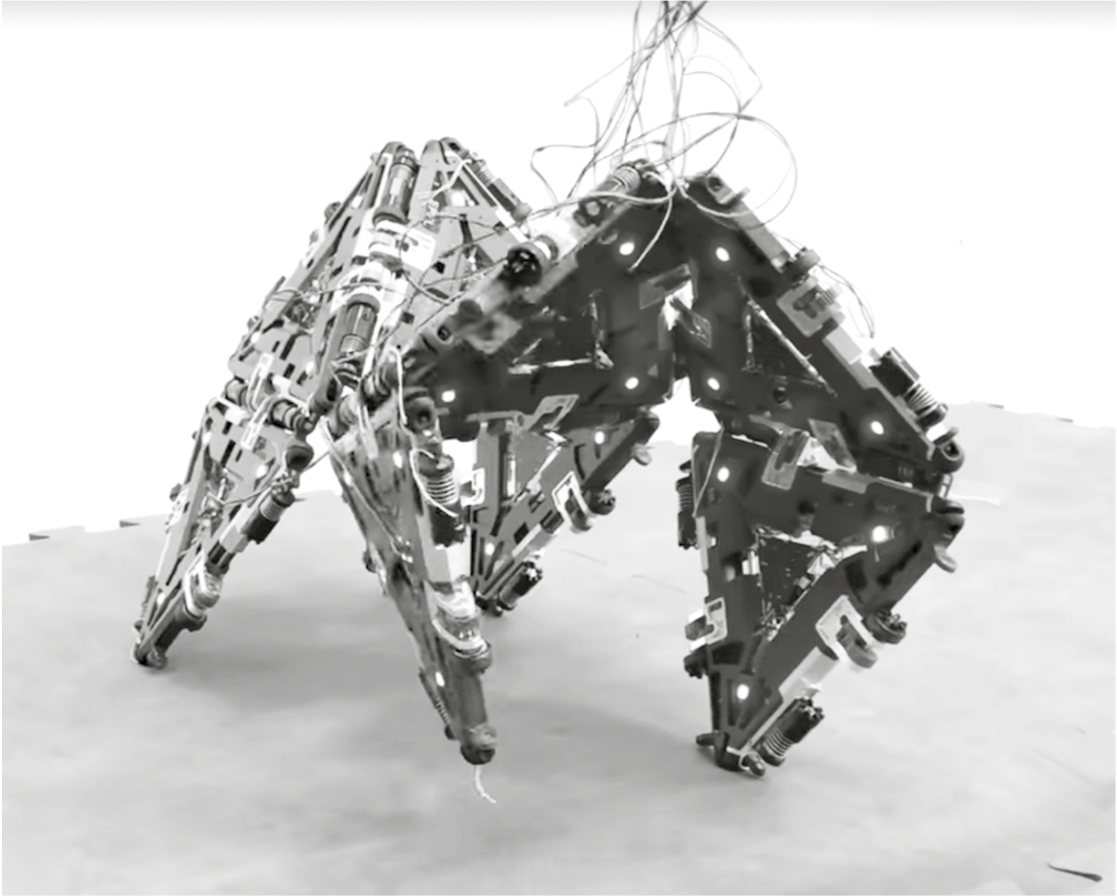
Otro modelo que también está llamando la atención es el robot modular Mori3, conformado a base de módulos triangulares, y capaz de adoptar muchas formas distintas mediante un proceso de reconfiguración que recuerda al de la papiroflexia u origami. Además, puede desplazarse e interactuar con objetos y hasta con personas. Con el cambio de forma, también puede cambiar de tamaño y de función.
Mori3 es obra de un equipo de la Escuela Politécnica Federal de Lausana, en Suiza. Sus módulos individuales se unen fácilmente entre ellos para crear polígonos de diferentes tamaños y formas. Debido a su naturaleza modular, dos o más ejemplares pueden acoplarse para transformarse en un único robot, o viceversa. También se comunican entre ellos y se encargan de ejecutar todos los procesos de acoplamiento.
Esta línea de investigación y desarrollo en robótica resulta muy prometedora para campos como el de la astronáutica. Un robot generalista como éste será menos eficaz que los robots especializados en desempeñar determinadas labores. Pero la gran ventaja de Mori3 es su versatilidad, pues fue diseñado en parte para ser utilizado en naves espaciales, que no disponen de espacio para almacenar diferentes robots para cada tarea individual que haya que llevar a cabo.
Bajo el título “Morphological flexibility in robotic systems through physical polygon meshing”, en la revista Nature Machine Intelligence, se exponen los detalles técnicos logrados con este innovador modelo de robot (fuente: Amazings).
Ahora que estamos hablando de aparatos “imitadores”, quiero platicarte sobre un proyecto pionero que desarrollará sensores con material orgánico que imitan el funcionamiento del cerebro. Los dispositivos, que se adaptan a la piel, permitirán detectar y analizar señales que emite el cuerpo humano y que aportan información sobre diferentes procesos biológicos.
La Universidad Rovira i Virgili (URV) de Tarragona participa con otras instituciones europeas en este proyecto pionero de computación neuromórfica, un campo de la informática y la neurociencia que se enfoca en el desarrollo de sistemas inspirados en el funcionamiento del cerebro humano.
El objetivo es desarrollar sensores neuromórficos con tecnología orgánica, basada sobre todo en polímeros. Estos dispositivos pueden ser de mucha utilidad en el campo de la salud, puesto que permitirán analizar, mediante un circuito que imita el cerebro, los datos que llegan a través de bioseñales, que son señales emitidas por el cuerpo humano y que aportan información sobre diferentes procesos fisiológicos del organismo. El grupo de investigación Nephos, del Departamento de Ingeniería Electrónica, Eléctrica y Automática, trabaja en este proyecto.
Una de las novedades es el uso de materiales orgánicos para todos los componentes en la fabricación de los sensores, básicamente polímeros. Esto permitirá que los dispositivos sean de bajo coste, sostenibles, imprimibles, flexibles y que se adapten a la piel (fuente: URV).
Pero no sólo en la computación neuromórfica se avanza en ese tema, también con inteligencia artificial se están creando neuronas electrónicas, también conocidas como neuronas artificiales. Estas innovadoras estructuras, diseñadas para replicar el funcionamiento de las neuronas biológicas, están revolucionando la forma en que interactuamos con las máquinas y podrían ser la clave para desarrollar una inteligencia artificial más sofisticada.
Estamos hablando de dispositivos electrónicos que semejan la funcionalidad de las neuronas biológicas del cerebro humano. Al igual que sus contrapartes biológicas, éstas son los bloques de construcción fundamentales de las redes neuronales artificiales, que son algoritmos de aprendizaje automático utilizados en inteligencia artificial. Estas redes se componen de múltiples capas de neuronas electrónicas interconectadas, que trabajan en conjunto para procesar información y realizar tareas específicas.
El funcionamiento de las neuronas electrónicas se basa en la transmisión de señales eléctricas y la comunicación entre ellas a través de conexiones sinápticas artificiales. Cada una recibe señales de entrada y las procesa mediante una combinación de operaciones matemáticas y funciones de activación. Luego emite una señal de salida que se transmite a otras neuronas en la red.
Una de las ventajas más destacadas es su capacidad para aprender y adaptarse. A través de algoritmos de aprendizaje automático,estas neuronas artificiales pueden ajustar sus conexiones sinápticas y fortalecer o debilitar su capacidad de transmitir señales en función de los patrones de entrada que reciben. Esto les permite aprender de forma autónoma y mejorar su rendimiento a medida que se exponen a más datos y ejemplos.
El desarrollo de neuronas electrónicas ha abierto nuevas posibilidades en campos como la robótica, el reconocimiento de voz, la visión por computadora y muchas otras aplicaciones de inteligencia artificial. Estas estructuras artificiales han demostrado ser altamente eficientes en el procesamiento de grandes cantidades de datos y en el reconocimiento de patrones complejos, superando en muchos casos las capacidades humanas (fuente: NCYT).

Comentamos ya sobre exoesqueletos e inteligencia artificial por separado, pero ahora vamos a juntarlos porque aunque los avances en robótica vestible han ayudado a recuperar la movilidad de las personas con discapacidades en las extremidades inferiores, los métodos actuales de control son limitados en cuanto a su capacidad para proporcionar movimientos naturales e intuitivos, lo que puede comprometer el equilibrio y contribuir a la fatiga y la incomodidad del usuario. Pocos estudios se han centrado en el desarrollo de sistemas de control que puedan optimizar el servicio prestado al usuario en términos de seguridad e independencia.
Los exoesqueletos existentes para la rehabilitación de miembros inferiores emplean diversas tecnologías para ayudar al usuario a mantener el equilibrio, como muletas especiales y sensores. Los que funcionan sin estas ayudas permiten caminar de forma más independiente, pero a costa de aumentar el peso y reducir la velocidad de la marcha.
Unos investigadores han desarrollado un nuevo sistema para controlar exoesqueletos de extremidades inferiores utilizando unamodalidad de inteligencia artificial denominada aprendizaje por refuerzo profundo. Éste permite un control de la marcha más eficaz y más natural para los usuarios, todo ello sin incrementar excesivamente el peso del traje.
Utilizando un modelo musculoesquelético acoplado a un exoesqueleto, simularon los movimientos de una extremidad inferior y entrenaron al sistema de control para conseguir patrones de marcha naturales, utilizando el aprendizaje por refuerzo profundo.
El equipo está probando ahora el sistema en condiciones reales y exponen los detalles técnicos en la revista académica Journal of Neuro Engineering and Rehabilitation, bajo el título “Robust walking control of a lower limb rehabilitation exoskeleton coupled with a musculoskeletal model via deep reinforcement learning” (fuente: Amazings).
En ese interés de mejorar la vida de aquellas personas que por una u otra razón han visto mermadas sus capacidades, unos científicos proponen un enfoque novedoso para el diseño de dispositivos que permitan a un usuario con deficiencia visual orientarse y seguir una ruta de forma eficaz, eficiente y segura.
Especialistas de la Escuela Técnica Superior de Ingenieros de Telecomunicación (ETSIT) de la Universidad Politécnica de Madrid (UPM), han desarrollado dispositivos que adaptan estímulos visuales a otro canal sensitivo (por ejemplo, convirtiendo imágenes en patrones sonoros), así como una plataforma de realidad mixta para la experimentación con nuevos sentidos artificiales (percepción del campo magnético, etcétera) y otras formas de interacción con el medio.
En definitiva, han creado nuevos formatos para codificar la información espacial del entorno en estímulos táctiles y auditivos, constituyendo una alternativa viable a otras soluciones invasivas (estimulación en la retina o en el córtex cerebral mediante implantes, etcétera). Estas interfaces humano-máquina facilitarían que los usuarios puedan percibir elementos distantes y orientarse, compensando la pérdida de visión.
El proyecto, titulado “Network QoS Impact on Spatial Perception through Sensory Substitution in Navigation Systems for Blind and Visually Impaired People”, publicado en la revista Sensors, se enmarca en el ámbito de los sistemas de navegación para personas ciegas y con discapacidad visual, cuyo propósito es promover la autosuficiencia a la hora de desplazarse hasta un punto de destino en una ciudad, centro comercial u otro lugar. Con este fin, proveen al usuario de información útil para que conozca su entorno, se oriente, y pueda reaccionar ante cualquier elemento potencialmente peligroso. Algunas de las soluciones más extendidas en el mercado utilizan sistemas de navegación por satélite, mapas y bases de datos de puntos de interés (restaurantes, comercios, etcétera). Otras, en cambio, optan por proporcionar medios para detectar e identificar obstáculos en el camino.
Sin embargo, en el contexto tecnológico actual, las redes de servidores y sensores urbanos permiten disponer de una mayor, y creciente, cantidad de información: mapas 3D de ciudades enteras, horarios de transporte público, posición de vehículos y transeúntes monitorizados en tiempo real… Llegados a este punto, el lenguaje hablado se revela como un nuevo cuello de botella, siendo necesario desarrollar formas más eficientes de proveer al usuario de toda la información recabada (fuente: UPM).
Pasando a otro tema, en medio de la creciente demanda de energía limpia y sostenible, los expertos en energía están explorando nuevas fronteras para aprovechar al máximo una de nuestras mayores fuentes: el Sol. Una idea innovadora ha surgido recientemente: aprovechar la luz solar en órbita terrestre para generar electricidad y enviarla de manera inalámbrica a la Tierra.
El concepto de capturar la luz solar en el espacio y transmitirla a la Tierra no es nuevo. Fue propuesto por primera vez en ladécada de 1960 por el científico Peter Glaser, quien acuñó el término “energía solar en el espacio” o “SPS” (por sus siglas en inglés). La idea básica es simple: colocar paneles solares gigantes en la órbita terrestre para capturar la energía del Sol de manera más eficiente, sin las limitaciones de la atmósfera y las condiciones climáticas.
El principal desafío técnico radica en la transmisión de la energía generada en el espacio a la Tierra. Se han propuesto varias soluciones, pero la más prometedora es el uso de microondas o láseres para enviarla de manera inalámbrica. Estos haces de energía serían recibidos en estaciones terrestres equipadas con antenas receptoras especiales, donde se convertirían nuevamente en electricidad utilizable.
El potencial de esta tecnología es inmenso. Al aprovechar la luz solar en órbita, podríamos obtener una fuente prácticamente inagotable y limpia. Además, al eliminar la necesidad de paneles solares en la superficie terrestre, podríamos liberar grandes extensiones de tierra para otros usos, como la agricultura o la conservación de la naturaleza.
Sin embargo, hay desafíos considerables que deben superarse antes de que esta visión se convierta en una realidad práctica. Uno de los principales desafíos es el costo de lanzar y mantener los paneles solares en órbita. Aunque los avances en la tecnología de cohetes y la fabricación de paneles solares han reducido los costos, aún se requiere una inversión significativa para construir una infraestructura espacial viable.
Además, la transmisión de energía inalámbrica plantea preocupaciones en términos de seguridad y posibles efectos adversos para la salud y el medio ambiente. Los científicos están llevando a cabo investigaciones exhaustivas para comprender y mitigar estos riesgos, pero aún se necesitan más estudios antes de que podamos implementar esta tecnología a gran escala (fuente: Amazings).
En este sentido, no sólo la energía solar es una opción, la energía eólica marina ha surgido como una alternativa prometedora y emocionante. Con la capacidad de aprovechar los vientos constantes y potentes en altamar, esta forma de energía renovable se está posicionando como una fuente clave en la transición hacia un futuro más limpio y sostenible. La energía eólica marina es la generación de electricidad a partir del viento que se encuentra en altamar. A diferencia de los terrestres, los cuales aprovechan los vientos en tierra firme, los parques eólicos marinos se instalan en aguas profundas, donde los vientos son más fuertes y más constantes. Estos parques consisten en aerogeneradores especiales, conocidos como turbinas eólicas marinas, que están diseñados para soportar las condiciones rigurosas del entorno marino y maximizar la captura de energía eólica.
La forma en que funcionan estas turbinas es similar a las terrestres. Cuando los vientos soplan, las palas de la turbina capturan la energía cinética del viento y la convierten en energía mecánica. Ésta se transmite a un generador que la convierte en electricidad utilizable. Las turbinas eólicas marinas suelen estar agrupadas en parques, formando una red de generadores que alimenta la electricidad producida a través de cables submarinos hacia la costa.
La energía eólica marina tiene varias ventajas significativas. En primer lugar, los vientos en altamar son más fuertes y más constantes que en tierra, lo que significa que las turbinas pueden generar electricidad de manera más consistente y eficiente. Además, la instalación de parques eólicos marinos en aguas profundas evita conflictos con el uso de tierras y reduce los posibles impactos ambientales negativos en los ecosistemas terrestres.
Además de sus beneficios ambientales, también tiene el potencial de impulsar la economía y crear empleo. La construcción y el mantenimiento requieren una variedad de habilidades y servicios especializados, lo que puede generar oportunidades de empleo en las comunidades costeras. Además, la industria de la energía eólica marina fomenta la investigación y el desarrollo tecnológico, impulsando la innovación y la competitividad en el sector energético.
A medida que la tecnología y la experiencia en la energía eólica marina continúan avanzando, se espera que esta fuente de energía renovable juegue un papel cada vez más importante en la matriz energética global (fuente: NCYT).
Finalmente quiero comentarte sobre un nuevo material tan blando como la gelatina que podría sustituir a los metales como medio de conexión eléctrica para marcapasos, implantes cocleares y otros mecanismos electrónicos de tipo médico.
Esa clase de implantes está creciendo de manera espectacular en tipos de dispositivo y en ejemplares. Los más tradicionales son los marcapasos y los implantes cocleares, pero para un futuro no muy lejano ya se perfilan microchips retinianos y cerebrales, para hacer cosas como aumentar la capacidad de visión cuando está mermada, tratar la depresión y recuperar la movilidad de partes paralizadas del cuerpo.
Algunos implantes son rígidos y voluminosos, mientras que otros son flexibles y diminutos. Pero sea cual sea su forma y función, casi todos los incorporan electrodos, pequeños componentes eléctricamente conductores que se adhieren directamente a los tejidos de interés para estimular eléctricamente en ellos los músculos y nervios deseados.
Los electrodos implantables se fabrican principalmente con metales rígidos que son conductores eléctricos por naturaleza. Pero con el tiempo, éstos pueden dañar los tejidos con los que están en contacto, causando cicatrices e inflamación que a su vez pueden degradar el rendimiento del implante.
Ahora, un equipo del Instituto Tecnológico de Massachusetts (MIT) ha desarrollado un material sin metal, que es tan blando y resistente como el tejido biológico y que puede conducir la electricidad de forma similar a como lo hacen los metales convencionales.
Este material, un tipo de hidrogel polimérico conductor de alto rendimiento, se puede aplicar como una tinta en la superficie de los objetos que ejercerán de electrodos y podría sustituir algún día a los metales en los implantes electrónicos médicos.
Los detalles técnicos aparecen en la revista Nature Materials, bajo el título “3D printable high-performance conducting polymer hydrogel for all-hydrogel bioelectronic interfaces” (fuente: NCYT).
*Universidad Autónoma de Nuevo León, San Nicolás de los Garza, México.
Contacto: luis.gomezv@uanl.mx