Responsabilidad social universitaria: desarrollo y entrega de una prótesis de brazo mioeléctrico
CIENCIA UANL / AÑO 25, No.116, noviembre-diciembre 2022
Dina Elizabeth Cortes Coss*, Yadira Moreno Vera*, Agustin Cortes Coss*
DOI: https://doi.org/10.29105/cienciauanl25.116-1
RESUMEN
La cuarta revolución industrial trajo consigo la integración de diversas habilidades permeables, mismas que, orientadas a estudiantes de perfiles de ingeniería, mantienen una visión integral que permite ofertar una educación interdisciplinaria. Gracias a lo anterior, estudiantes de asignaturas como Mecatrónica puedan diseñar, elaborar y adaptar prótesis para pacientes amputados dentro de su formación científica y social, ampliando el campo de estudio a una aplicación práctica que permita fomentar la responsabilidad social universitaria. Dicha transversalidad permite que los estudiantes de Mecatrónica sean empáticos y que a su vez puedan vincular las tecnologías que promuevan el compromiso social.
Palabras clave: responsabilidad social universitaria, prótesis mioeléctrica, estudiantes de Mecatrónica, desarrollo tecnológico, calidad de vida.
ABSTRACT
The fourth industrial revolution achieved the integration of various permeable skills, which aimed at students with engineering profiles, maintain a comprehensive vision that allows offering an interdisciplinary education. Thanks to the above, students of subjects such as Mechatronics can design, develop and adapt prostheses for amputee patients within their scientific and social studies training, expanding the field of study to a practical application that allows promoting university social responsibility. This transversality allows Mechatronics students to be empathetic and, in turn, to link technologies that promote social commitment.
Keywords: university social responsibility, myoelectric prosthesis, mechatronics students, technological development, quality of life.
Las prótesis mioeléctricas son controladas por un medio externo que sintetiza las señales y las envía a la tarjeta de control. Éstas tienen el más alto grado de rehabilitación ya que no requieren de arneses o medios de suspensión. El fundamento es que al contraerse el músculo se generará una señal eléctrica de contracción pequeña que puede ser registrada mediante sensores que entran en contacto con la piel.
La prótesis de brazo ha constituido desde siempre un objeto de investigación tanto de la Medicina como de la Ingeniería Mecánica. Ésta se encuentra dirigida a la recuperación de esa parte del cuerpo humano, con el fin de restaurar su funcionalidad permitiendo la manipulación de objetos. La pericia proporcionada por la mano humana es vital para el desarrollo de actividades laborales, recreativas y de comunicación; la rehabilitación por medio de miembros artificiales potencia dicha actividad al emular el funcionamiento de los naturales e impacta fuertemente en la calidad de vida del paciente que los ha perdido.
Tras la incorporación de habilidades blandas que trajo consigo la cuarta revolución industrial, el desarrollo de las prótesis como objeto de práctica en clase es tan sólo una de las condiciones para llevar a cabo dicha experiencia. En la Facultad de Ingeniería Mecánica y Eléctrica (FIME), de la Universidad Autónoma de Nuevo León (UANL), el trabajo teórico y práctico es vinculado a la coordinación de estrategias inclusivas para que los prototipos sean canalizados a pacientes que requieran dicha implementación, logrando fomentar la responsabilidad social universitaria.
RESPONSABILIDAD SOCIAL UNIVERSITARIA
Para Vallaeys y Álvarez (2019) la responsabilidad social universitaria (RSU) es “una nueva política de gestión universitaria para responder a los impactos organizacionales y académicos de la universidad”. La RSU aplicada a los sectores educativos adquiere un compromiso unilateral que demanda a las instituciones que replanteen sus presupuestos epistémicos y su currículo para presentar una alternativa que permita establecer pasos académicos frente a las crisis de la sociedad.
Una universidad socialmente responsable es aquélla que garantiza que el egresado y los resultados de las investigaciones que presentan sean legítimos, es decir, que sean científicamente confiables y no sólo un simple requisito (Vallaeys, 2014).
FORMACIÓN INTEGRAL DE INGENIEROS Y HABILIDADES BLANDAS
La presente era demanda profesionales altamente efectivos, idóneos para concertar sus conocimientos técnicos con sus aptitudes socioemocionales orientadas a la resolución de problemas; éstas son conocidas como habilidades blandas, relacionales, transversales, no cognitivas o competencias para el siglo XXI.
Millalén (2017) sostiene que son aquellas capacidades que promueven el desempeño laboral de los egresados bajo esta instrucción, incluyen destrezas sociales e interpersonales, es decir, la permeabilidad de trabajar en ambientes diversos y la capacidad de transpolar lo aprendido a un campo social.
En la tabla I se recoge la valoración que la industria le asigna a estas cualidades.

Como es perceptible, las aptitudes socioemocionales son esenciales para el desarrollo personal, la socialización y el éxito laboral. En el contexto educativo, el objetivo es que los estudiantes adquieran simultáneamente
competencias técnicas y destrezas blandas; por consiguiente, dichas capacidades no sólo debieran aprenderse en contextos académicos, sino también fuera de ellos, por ejemplo, en la vida personal y social.
CONJUNCIÓN DE HABILIDADES BLANDAS Y DISEÑO DE UN BRAZO MIOELÉCTRICO
El propósito del programa educativo de Ingeniero en Mecatrónica ofertado en la FIME-UANL es preparar profesionales que se incorporen a los acelerados progresos y cambios de la tecnología (UANL, 2021); el objetivo particular es innovar las tecnologías existentes y asimilar las emergentes para resolver problemas de ingeniería que involucren el diseño dedispositivos complejos y máquinas inteligentes de acuerdo con los requerimientos sociales; permitiendo la innovación de tecnologías propias y su adaptación al desarrollo de nuevos procesos, productos y servicios para la integración de dispositivos, como las prótesis que sustituyan la falta de una extremidad del cuerpo humano, permeando con lo anterior el desarrollo de habilidades blandas y la RSU.
METODOLOGÍA
Para este proyecto se utilizó la metodología de solución problémica, en la que dentro de las aulas se fortaleció la práctica de estudiantes de Mecatrónica en laboratorios que permitieron desarrollar la prótesis y llevarla hasta su implementación. La figura 1 muestra el diagrama de bloques del método experimental.
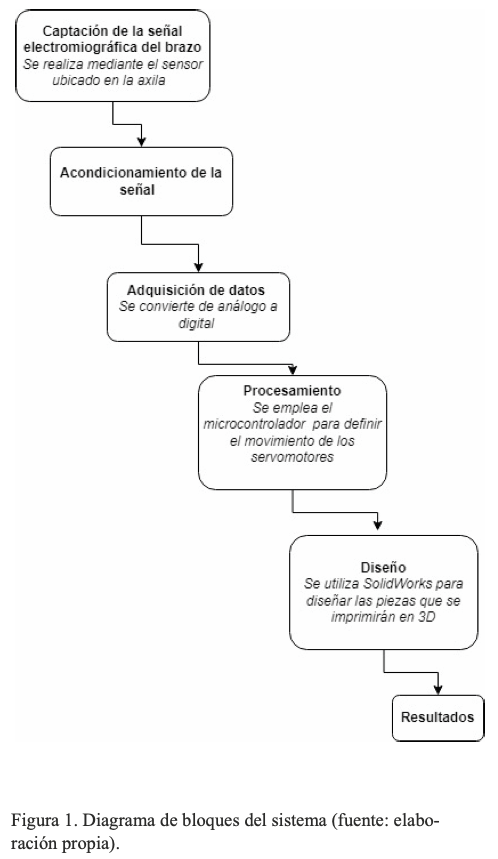
A continuación se describen los pasos llevados a cabo en cada fase:
Fase 1. Análisis de los requerimientos
En esta etapa se definió que la Biomecánica es la ciencia que estudia las fuerzas internas y externas y su incidencia sobre el cuerpo humano. Bajo esta consideración, tuvo que reconocerse que la Anatomía muestra, en reposo y en un momentodado, las formas de una estructura, mientras que la Biomecánica permite comprender las fuerzas sobre estas estructuras y los efectos que ocasionan. Al respecto, Miralles (2001) aclara: “La Anatomía no es más que la visión momentánea de un largo proceso fisiológico que se sigue sin interrupción en los seres vivos”.
Una vez comprendiendo lo anterior, fue posible trabajar con la anatomía del brazo, definiendo que consta del húmero, que se articula en posición distal con el antebrazo por medio del complejo del codo, éste, a su vez, consta de tres huesos: húmero, cúbito y radio. Las uniones de éstos dan lugar a otras tres coyunturas separadas que comparten una cavidad sinovial común, lo que permite la flexión, extensión, pronación y supinación del antebrazo sobre el húmero.
La prótesis electromecánica que fue diseñada cuenta con un dispositivo electrónico para controlar el motor que abre y cierra la mano por medio de un sensor que está ubicado en la axila opuesta. Para el diseño se tomaron en cuenta específicamente las necesidades de un paciente en particular, por lo que esta fase fue fundamental para analizar los requerimientos individuales de éste. El dispositivo en cuestión consta de un regulador de voltaje, un microcontrolador, un módulo de relevadores, un sensor y tres terminales (una para la alimentación de una batería, otra para el propio sensor y una para el motor). Lo anterior fue encapsulado con su tarjeta de circuito impresa (PCB por sus siglas en inglés Printed Circuit Board).
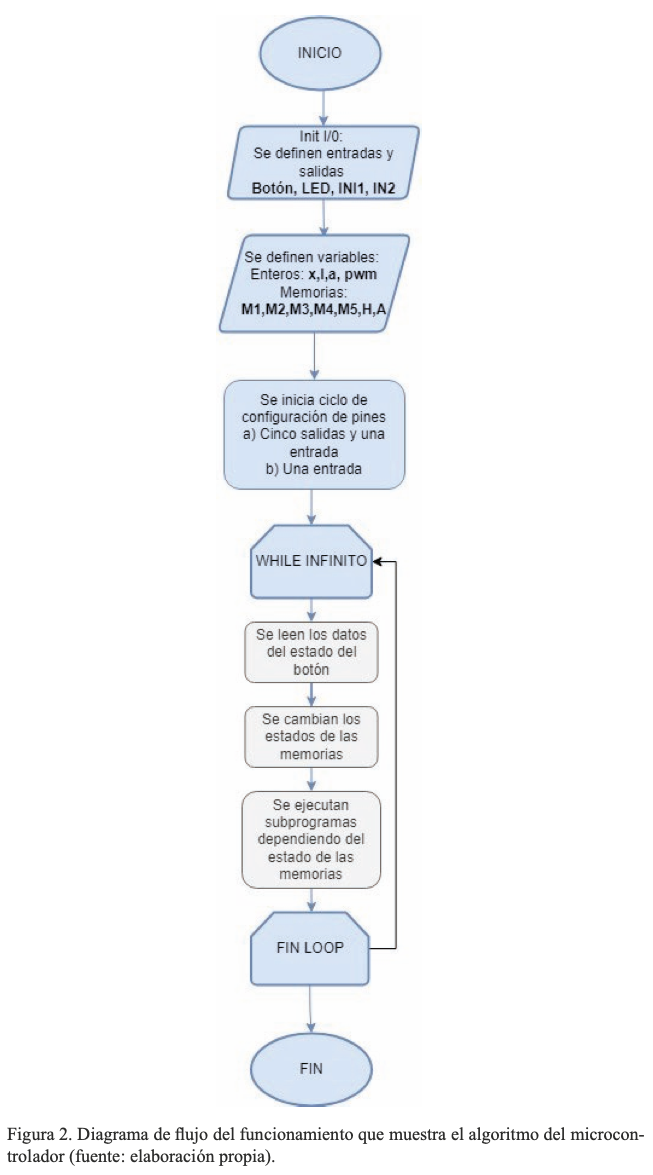
En la figura 2 se describe cómo se planteó el funcionamiento del algoritmo del microcontrolador que interpretará las señales electromiográficas para emitir una respuesta. Para este caso las entradas consistieron en la lectura del estado (1,0) del botón y el In1. El estado del led quedó definido como una salida (encendido/ apagado) al igual que el In2. Lo siguiente fue definir las variables, en este caso las que se asociaron a números enteros (x, l, a y pwm) y las que representan un espacio de memoria (M1, M2, M3, M4, M5, H, A). Una vez finalizada esta etapa, se definió el ciclo de configuración de los pines, estableciendo así dos alternativas: cinco salidas y una entrada o una sola entrada. Después se estableció el ciclo loop en el que, de acuerdo al estado del botón, cambiarían los de las memorias y, según se encuentren éstas, se ejecutarían subprogramas.
Fase 2. Diseño
Una vez que se obtuvieron los requerimientos, se instruyó a los estudiantes a plantear un diseño para el brazo utilizando el software de computadora SolidWorks, tal como se muestra en la figura 3(b). Éste permitió realizar el prototipo funcional, que fue usado para la prótesis mioeléctrica.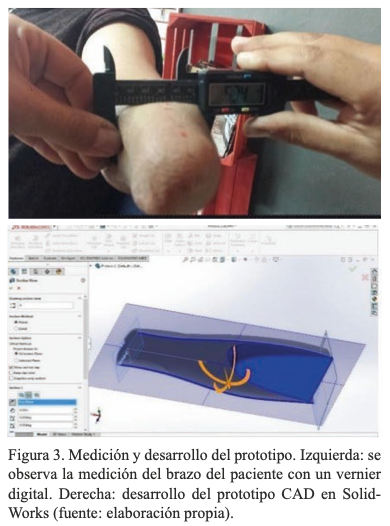
Fase 3. Análisis del sistema mioeléctrico
Los impulsos nerviosos son potenciales de acción de las neuronas motoras que se transmiten a las células musculares a lo largo de sus axones, las ramificaciones terminales de éstos y las uniones neuromusculares. La instrumentación EGM utilizada en las prótesis mioeléctricas va dirigida a obtener una representación inteligible de los potenciales de acción musculares. Para conseguirlo, se debe desarrollar un sistema lo suficientemente sensible dado que las magnitudes bioeléctricas son muy pequeñas. Las señales amplificadas son de entre 1 y 10 V, rango en el que funcionan los circuitos electrónicos de los microprocesadores como el utilizado en este trabajo (Gila 2009).
Las principales características de estudio de los EMG son la amplitud del pico principal, los cambios de fase de la señal, la duración y la estabilidad de la misma. Según la bibliografía (Pinzón, 2012), la amplitud de la tensión que se puede medir está comprendida entre los centenares de μV hasta unos pocos mV, y el espectro frecuencial entre los 20 y los 500 Hz, concentrando la mayor cantidad de potencia entre los 50 y los 200 Hz. La duración se define como el tiempo desde la deflexión inicial al retorno a la línea de base, y suele tener unos valores medios de entre 5 y 15 ms.
El procesamiento digital de señales biomédicas, como las señales electromiografías superficiales (EMGS), son fundamentales en el control de dispositivos activos como las prótesis mioeléctricas. Éstas consisten en un sistema accionado por servomotores que se rigen a partir de señales EMG, bien sean intramusculares, capturadas mediante agujas, o superficiales, recogidas en el muñón del paciente mediante electrodos (De la Rosa y Liptak, 2002).
Fue en esta fase que se mantuvo un acercamiento a la ficha técnica del paciente proporcionado por la Fundación En Espíritu y Verdad (cuya sinergia fue indispensable para la entrega de la misma).
Fase 4. Impresión del prototipo
Aunque la prótesis mioeléctrica es más pesada en comparación con las cosméticas y accionadas por el cuerpo, sigue siendo más ligera que el brazo humano típico, por lo anterior, y tras la determinación del material, los estudiantes procedieron a la impresión de piezas para luego armarla por completo.
Se realizaron impresiones en plástico con motores independientes y con baterías normales.
Conforme se procedía, los estudiantes pudieron reconocer diversas áreas de oportunidad. Una de ellas es que el plástico de impresión 3D se degrada con el sol. Además, se pudo observar que los tendones elaborados con nailon se rompían cuando se usaban por cierto tiempo y que las falanges de los dedos eran comerciales, por lo que después de un lapso se quebraban.
Otro factor de interés fue que la detección de la electrónica que utilizaban los pulsos de la piel para poder mover los dedos presentaba errores si el paciente sudaba, ya que la conductividad de la piel cambiaba y por ende no se controlaba de manera correcta. También se determinó que las baterías no daban la carga necesaria para soportar el movimiento constante de los motores, por lo que tuvieron que ser reemplazadas por una batería de LiPo de cuatro celdas de 5400mAh junto a un microcontrolador que se encarga de cada celda. Las ventajas de estas baterías es que, aunque las pilas se descarguen, el sistema sigue funcionando con la misma potencia debido a que el microcontrolador intercambia las celdas de manera electrónica.
Lo anterior pudo ser determinado con base en la fase de experimentación de materiales, donde finalmente, tras diversas pruebas, se obtuvo un dispositivo protésico ligero, hecho en su mayoría de plástico. El zócalo está hecho generalmente de polipropileno, metales ligeros como el titanio y el aluminio han reemplazado en gran medida al acero en el pilón, considerando que las aleaciones de estos materiales se utilizan con mayor frecuencia.
En la figura 4 se puede observar la prótesis ya armada, así como los materiales utilizados para su desarrollo. El 100% de los materiales utilizados fueron de origen mexicano. El costo final fue de $18,000.000 y fue aportación del paciente y delrecurso de la Fundación.

RESULTADOS
Como se pudo observar con anterioridad, el trabajo realizado en práctica de laboratorio pudo ser concretado y una vez terminado se transfirió a la asociación civil para que ésta entregara la prótesis al paciente en cuestión para con ello permitir que mantenga una mejor calidad de vida. Tal como se muestra en la figura 5, fue necesario hacer uso de métodos especiales de movimiento interactuando con los mecanismos de actuadores y servomotores para personas que tuvieron amputación en el brazo, así como de diferentes herramientas de diseño, control y computación.

No obstante, pese a que la entrega constituye la etapa final del proyecto, el trabajo de laboratorio práctico de los estudiantes fue fundamental para promover no sólo la teoría, sino la parte que vincula la RSU en los mismos.
Como es perceptible, el trabajo desarrollado entregó una prótesis de brazo mioeléctrico al paciente bajo un tipo de entrega protocolaria donde estudiantes, docentes y personal de la fundación probaron, ajustaron y realizaron la entrega oficial de la misma (FIME, 2021).
CONCLUSIONES
A través de la experimentación de materiales y con ocho diferentes tipos de electrónica y varios tipos de baterías, fue posible mover la prótesis. Cabe precisar que el desarrollo del mismo cobró casi un año de trabajo escolar donde fueron diseñados seis prototipos hasta llegar al objetivo final; se utilizó un arnés para que el paciente se sienta más seguro de su utilización y su comodidad.
Dado a la gestión, documentación y la asistencia financiera del paciente y de la fundación fue posible contribuir en el diseño de la prótesis mioeléctrica.
* Universidad Autónoma de Nuevo León, San Nicolás de los Garza, México.
Contacto: dina.cortescs@uanl.edu.mx
REFERENCIAS
Aasheim, C.L., Li, L., y Williams , S. (2009). Knowledge and skill requirements for entrylevel information technology workers: A comparison of industry and academia. Journal of Information Systems Education. 20(3):349-356.
De la Rosa, S.R., y Liptak, L. (2002). Entrenador mioeléctrico de prótesis para amputados de brazo y mano. Mapfre medicina. 13(1):11-19.
Durán Acevedo, C.M., y J.M, A.L. (2013). Optimización y clasificación de señales EMG a través de métodos de reconocimiento de patrones. Iteckne. 10(1):67-76. Disponible en: http://www.scielo.org.co/ scielo.php?script=sci_arttext&pid=S1692- 17982013000100009&lng=en&tlng=es.
FIME. (2021). Entrega FIME prótesis personalizada gracias a programa de inclusión y vinculación. Disponible en:https://www.fime.uanl.mx/se-entrega-fime-protesis-personalizada-gracias-a-programa-de-inclusion-y-vinculacion/
Gila, L., Malanda, A., Rodríguez Carreño, I., et al. (2009). Métodos de procesamiento y análisis de señales electromiográficas. Anales del Sistema Sanitario de Navarra. 32(supl. 3):27-43. Disponible en: http://scielo.isciii.es/scielo.php?script=sci_arttext&pid=S1137- 66272009000600003&lng=es&tlng=es
Millalén, F.V. (2017). Infusión de habilidades blandas en el currículo de la educación superior: clave para el desarrollo de capital humano avanzado. Revista Akadèmeia. 15(1):53-73.
Miralles, R.C. (2001). Biomecánica de la columna. Revista de la Sociedad Española del Dolor. 8(2):2-8.
Pinzón, J.V., Mayorga, R.P., y Hurtado, G.C. (2012). Brazo robótico controlado por electromiografía. Scientia et technica. 1(52):165-173.
Universidad Autónoma de Nuevo León. (2021). Oferta educativa de Ingeniero en Mecatrónica. Disponible en: https://www.uanl.mx/oferta/ ingeniero-en-mecatronica/
Vallaeys, F. (2014). La responsabilidad social universitaria: un nuevo modelo universitario contra la mercantilización. Revista Iberoamericana de Educación Superior. 5(12):105-117.
Vallaeys, F., y Álvarez-Rodríguez, J. (2019). Hacia una definición latinoamericana de responsabilidad social universitaria.Aproximación a las preferencias conceptuales de los universitarios. Educación XX1. 22(1):93-116.