CONTROL BASADO EN PASIVIDAD DE SISTEMAS MODELADOS EN GRÁFICAS DE LIGADURA
René Galindo Orozco*
CIENCIA UANL / AÑO 23, No.103, septiembre-octubre 2020
El control automático ha sido ampliamente utilizado para mejorar el desempeño de sistemas en lazo cerrado o reducir el efecto de perturbaciones o de dinámicas no modeladas sobre salidas de interés, y el incremento en la complejidad de los sistemas requiere de modelos matemáticos para control automático. Se presentan herramientas o técnicas útiles para modelado y para configuraciones presentes en control y mecatrónica. Los modelos matemáticos de la planta y del controlador son desarrollados y sintetizados en el dominio físico, utilizando la técnica de gráficas de ligadura (Bond Graph, BG) (Karnopp y Rosenberg, 1975). Así, el controlador es físicamente realizable y sus parámetros de control son sintonizados preservando algunas propiedades físicas. En particular, se garantiza que el sistema en lazo cerrado sea pasivo. Pasividad implica que cierta función de transferencia es de grado relativo cero o uno y es positiva real, estas propiedades logran estabilidad robusta (Brogliato et al., 2007), esto es, se garantiza estabilidad del sistema retroalimentado ante la presencia de perturbaciones externas o incertidumbres. Además, pasividad asegura cierto nivel de seguridad para el usuario del sistema, debido a que en ausencia de fuentes externas la energía total que puede extraerse del sistema en cada instante de tiempo es siempre menor que la energía inicial almacenada.
El control basado en modelos en BG ha utilizado ligaduras que permiten el intercambio de energía y ligaduras activas que solamente permiten el intercambio de información. En el primer enfoque, cada controlador es diseñado específicamente para una planta, incorporando información de ésta, de su ambiente y argumentos físicos, tal como en el control de un sistema multipéndulo (Gawthrop, 1995). Además, un observador no lineal en BG (Roberts, Balance y Gawthrop, 1995) ha sido propuesto para estimar las velocidades angulares de un doble péndulo. En estos trabajos no se garantiza la estabilidad del sistema en lazo cerrado, en cambio, la estabilización de un equilibrio deseado (Donaire y Junco, 2009) se logra resolviendo el conjunto de ecuaciones diferenciales parciales que minimizan la función de energía de lazo cerrado. Esta función se expresa junto con la interconexión y amortiguamiento en un BG objetivo, que se construye a partir del BG de la planta. Además, la Estructura de Unión (EU) (Donaire y Junco, 2009) ha sido utilizada para determinar equivalencias y propiedades entre el BG de la planta y su representación Hamiltoniana, y mejoran la robustez de los métodos basados en pasividad, agregando al BG objetivo elementos virtuales que representan la acción integral. En el segundo enfoque, el controlador es diseñado utilizando las técnicas de control convencionales, como en el control de una celda de combustible (Vijay, Samantaray y Mukherjee, 2009).

Por otro lado, propiedades del sistema, como controlabilidad y observabilidad estructurales, han sido analizadas utilizando la EU del BG de la planta y manipulaciones causales (Dauphin-Tanguy, Rahmani y Sueur, 1999). Las propiedades estructurales de los sistemas dinámicos (Lin, 1974) son propiedades válidas para casi todos los valores numéricos de sus parámetros. Además, la estabilidad estructural y el desacoplamiento entrada/salida (Dauphin-Tanguy, Rahmani y Sueur, 1999) han sido analizados, aplicándolo a un modelo de suspensión de medio carro. Propiedades de BG singulares han sido analizadas (Lamb, Woodall y Asher, 1997) mostrando su relación con la causalidad. Lazos algebraicos se eliminan (González y Galindo, 2009a; 2009b), basándose en una Estructura de Pseudounión (EPU) (González y Galindo, 2009a) que se construye para una descripción en espacio estados de un sistema lineal invariante en el tiempo dado.
Muchos trabajos sobre Control Basado en Pasividad (CBP) han sido desarrollados (Ortega y García, 2004), pero pocos sobre CBP basado en modelos en BG, en uno de ellos (Brogliato et al., 2007) se agrega amortiguamiento a un convertidor de potencia de CD/CD tal que el sistema en lazo cerrado sea pasivo.
Notación: ![]() es la matriz identidad de dimensión p×p; diag
es la matriz identidad de dimensión p×p; diag![]() es una matriz diagonal de dimensión n×n cuyos elementos son
es una matriz diagonal de dimensión n×n cuyos elementos son ![]() una matriz real M es semidefinida positiva si y sólo si la parte simétrica
una matriz real M es semidefinida positiva si y sólo si la parte simétrica ![]() es positiva semidefinida, donde
es positiva semidefinida, donde ![]() es la transpuesta de M;
es la transpuesta de M; ![]() y
y ![]() son el esfuerzo y flujo del elemento M, respectivamente, y 0 y 1 son conexiones en paralelo y en serie, respectivamente.
son el esfuerzo y flujo del elemento M, respectivamente, y 0 y 1 son conexiones en paralelo y en serie, respectivamente.
EPU PROPUESTAS
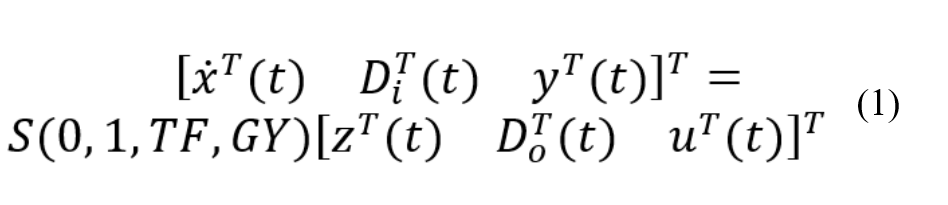
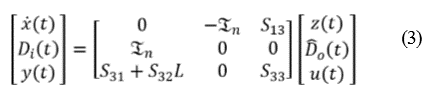
Uno de los objetivos principales es utilizar las propiedades de la EU de BG para diseñar controladores robustos. Las uniones están clasificadas como uniones externas, conectando los elementos almacenadores de energía I y C, los disipativos R y las fuentes moduladas de e y f, ![]() , respectivamente, y en uniones internas conectando las uniones 0 y 1, y los elementos transformadores TF y giradores GY. La EU, S(0, 1, TF, GY) habilita o deshabilita los intercambios de energía que hacen cumplir las restricciones de balance de energía y algebraicas de los sistemas dinámicos. Las relaciones de la EU están dadas por,
, respectivamente, y en uniones internas conectando las uniones 0 y 1, y los elementos transformadores TF y giradores GY. La EU, S(0, 1, TF, GY) habilita o deshabilita los intercambios de energía que hacen cumplir las restricciones de balance de energía y algebraicas de los sistemas dinámicos. Las relaciones de la EU están dadas por,
donde ![]() es el estado asociado con los elementos I y C en causalidad integral,
es el estado asociado con los elementos I y C en causalidad integral, ![]() es la coenergía compuesta de variables de e y f,
es la coenergía compuesta de variables de e y f, ![]() y
y ![]() asocian esfuerzos y flujos entre el campo disipativo R y la EU,
asocian esfuerzos y flujos entre el campo disipativo R y la EU, ![]() y
y ![]() son la entrada y salida del sistema, respectivamente, y S(0, 1, TF, GY) tiene una partición a bloques acorde con las dimensiones de ẋ(t), Di(t), y(t), z(t),
son la entrada y salida del sistema, respectivamente, y S(0, 1, TF, GY) tiene una partición a bloques acorde con las dimensiones de ẋ(t), Di(t), y(t), z(t), ![]() y u(t), y se asume que todos los estados tienen una asignación de causalidad integral. Relaciones lineales de los campos disipativos y de almacenamiento son z(t)=Fx(t) y
y u(t), y se asume que todos los estados tienen una asignación de causalidad integral. Relaciones lineales de los campos disipativos y de almacenamiento son z(t)=Fx(t) y ![]() =
=![]() donde F y L son matrices diagonales compuestas de elementos 1/I y 1/C, y de elementos R y 1/R, respectivamente. Las EU son tipos especiales de campos-R que nunca disipan potencia, sus propiedades (Lin, 1974; Sueur y Dauphin-Tanguy, 1989) de continuidad de potencia son,
donde F y L son matrices diagonales compuestas de elementos 1/I y 1/C, y de elementos R y 1/R, respectivamente. Las EU son tipos especiales de campos-R que nunca disipan potencia, sus propiedades (Lin, 1974; Sueur y Dauphin-Tanguy, 1989) de continuidad de potencia son,
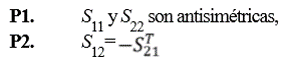
Sin embargo, modelos en BG que usan ligaduras activas no satisfacen P1 y P2. Estos sistemas no conservativos surgen en la interconexión de subsistemas sin efecto de carga o en modelos en BG que incluyen escalamientos de potencia (Li y Ngwompo, 2005) o en sistemas que incluyen fuentes internas ![]() , como los actuadores en sistemas de control. En este caso la EU es función de estas fuentes, esto es,
, como los actuadores en sistemas de control. En este caso la EU es función de estas fuentes, esto es, ![]() .
.
Se proponen nuevas EPU para el sistema en lazo cerrado, que permiten enfocarse en las propiedades de energía de su multipuerto disipativo, en particular pasividad. CBP es investigado basado en las EPU propuestas. Uno de los objetivos es diseñar un control tal que el sistema en lazo cerrado sea pasivo, esto es, el control debe ser tal que el multipuerto disipativo sea pasivo en las EPU propuestas, entonces si el resto de los elementos es pasivo y solamente se tienen entradas y salidas cuyo producto es potencia, el sistema retroalimentado es pasivo (Beaman y Rosenberg, 1988). Se dan aplicaciones de este resultado cuando la planta y el controlador están descritos por EU propuestas. Estas EPU requieren que el número de Is y Cs sea igual al de Rs (Ortega y García, 2004). Esta condición se puede lograr mediante,

Proposición 1 (Ngwompo y Galindo, 2017). Si se requiere aumentar el modelo en BG,
- Conectando Rs relativamente grandes en paralelo con cada C o conectando Cs relativamente pequeñas en paralelo con cada R, y
- conectando Rs relativamente pequeñas en serie con cada I o conectando Is relativamente pequeñas en serie con cada R.
Figura 1. Aumentando el modelo en BG utilizando elementos parásitos.
Esta proposición constructiva se muestra en la figura 1, donde se realiza una asignación de causalidad integral predefinida. Así, las ligaduras fuertes imponen la causalidad a todos los elementos conectados a estas uniones y aseguran que ![]() . Por lo que, dado que esto se realiza por cada par R − C y R − I, entonces, se asume que,
. Por lo que, dado que esto se realiza por cada par R − C y R − I, entonces, se asume que,
Suposición 1. Cada subsistema a ser interconectado sin efecto de carga satisface ![]()
Además, la figura 1 implica que ![]() para un sistema conservativo. Sin embargo, esto no es cierto para sistemas no conservativos, para los cuales, en el siguiente lema se propone una representación alternativa y su construcción, es decir, se establece la EPU para un BG aumentado.
para un sistema conservativo. Sin embargo, esto no es cierto para sistemas no conservativos, para los cuales, en el siguiente lema se propone una representación alternativa y su construcción, es decir, se establece la EPU para un BG aumentado.
Lema 1 (Ngwompo y Galindo, 2017). Dada una EU, ![]() , de un BG modelando a un sistema lineal invariante en el tiempo,
, de un BG modelando a un sistema lineal invariante en el tiempo,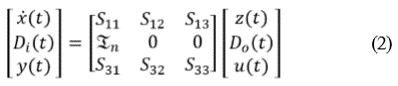 que satisface la suposición 1, donde
que satisface la suposición 1, donde ![]() ,
, ![]() ,
, ![]() Entonces, una EPU interna equivalente
Entonces, una EPU interna equivalente ![]() satisfaciendo P1 y P2 es,
satisfaciendo P1 y P2 es,
donde el nuevo multipuerto disipativo está definido por la ecuación constitutiva, ![]() . Más aún, el sistema es pasivo si:
. Más aún, el sistema es pasivo si: ![]()

Figura 2. EPU detallada para modelos en BG.
La ecuación (3) y la definición del multipuerto disipativo sugieren que la EPU tiene la representación detallada dada en la figura 2, donde ![]() Esta representación claramente muestra que la EPU consiste de una estructura interna
Esta representación claramente muestra que la EPU consiste de una estructura interna ![]() y una estructura externa S.
y una estructura externa S. ![]() es conservativa, dado que contiene únicamente elementos 0, 1, TF y GY, satisfaciendo P1 y P2, esto es,
es conservativa, dado que contiene únicamente elementos 0, 1, TF y GY, satisfaciendo P1 y P2, esto es, ![]() cuando u(t)=0, que en general no se cumple para S.
cuando u(t)=0, que en general no se cumple para S.
La unión entre ![]() y R, mostrada en la figura 2, tiene la particularidad de que mientras
y R, mostrada en la figura 2, tiene la particularidad de que mientras ![]() es transferida sin ningún cambio, su variable conjugada
es transferida sin ningún cambio, su variable conjugada ![]() es escalada por el factor matricial
es escalada por el factor matricial ![]() en
en ![]() Esto ocurre en los elementos con escalamiento de potencia (Li y Ngwompo, 2005) que ahora son multipuertos PTF y PGY teniendo un factor de escala matricial
Esto ocurre en los elementos con escalamiento de potencia (Li y Ngwompo, 2005) que ahora son multipuertos PTF y PGY teniendo un factor de escala matricial ![]() involucrando un acoplamiento entre las ganancias de las fuentes moduladas en las submatrices
involucrando un acoplamiento entre las ganancias de las fuentes moduladas en las submatrices ![]() y los parámetros de R en L.
y los parámetros de R en L.
Se ha desarrollado una aplicación simple del Lema 1 a un circuito RC en lazo cerrado (Ngwompo y Galindo, 2017), donde se da el BG con PTF y se analizan las propiedades de pasividad. Además, se ha desarrollado (Ngwompo y Galindo, 2017) el análisis de pasividad para una configuración con retroalimentación estática de salida y su aplicación a un sistema de dos puertos.
El Lema 1 provee una representación donde todos los elementos disipativos y la generación interna de potencia están incluidos en el nuevo campo-R. El balance de la disipación y la generación interna está entonces expresado en la ecuación constitutiva de este elemento y por lo tanto determina la propiedad de pasividad del sistema completo. Intuitivamente, si el sistema retroalimentado es pasivo, la potencia total disipada deberá ser mayor que la potencia generada por las fuentes internas.
CBP PROPUESTO
Se propone (Galindo y Ngwompo, 2017) una EU, ![]() asociada a un modelo en BG para el controlador y se asume que la EU,
asociada a un modelo en BG para el controlador y se asume que la EU, ![]() asociada a un modelo en BG de la planta controlable y observable satisface,
asociada a un modelo en BG de la planta controlable y observable satisface,
Suposición 2. Con j = a para el controlador y j = b para la planta,
- son sistemas conservativos, esto es,
 y es antisimétrica, y
y es antisimétrica, y - las salidas
 no están relacionadas con los campos disipativos
no están relacionadas con los campos disipativos 
Bajo esta suposición,

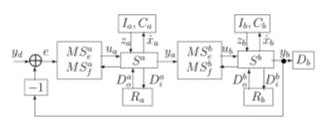
Figura 3: Configuración retroalimentada de modelos en BG.

Se propone una EPU para la configuración retroalimentada mostrada en la figura 3, donde ![]() son las EU asociadas a los BG del controlador y de la planta, respectivamente. Se asume que los subsistemas están interconectados por ligaduras activas que modulan las fuentes de esfuerzo y flujo, esto es,
son las EU asociadas a los BG del controlador y de la planta, respectivamente. Se asume que los subsistemas están interconectados por ligaduras activas que modulan las fuentes de esfuerzo y flujo, esto es,

siendo ![]() a matrices no singulares compuestas por las ganancias de
a matrices no singulares compuestas por las ganancias de ![]() . Debido a esta conexión, el sistema completo puede no ser conservativo. El siguiente Teorema presenta condiciones de pasividad (que implican estabilidad) basadas en las propiedades del multipuerto disipativo del sistema en lazo cerrado. El objetivo es seleccionar las ganancias
. Debido a esta conexión, el sistema completo puede no ser conservativo. El siguiente Teorema presenta condiciones de pasividad (que implican estabilidad) basadas en las propiedades del multipuerto disipativo del sistema en lazo cerrado. El objetivo es seleccionar las ganancias ![]()
![]() los elementos de la EU propuesta y el multipuerto disipativo del controlador dado por (4).
los elementos de la EU propuesta y el multipuerto disipativo del controlador dado por (4).
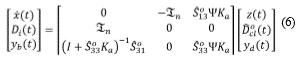
Teorema 1 (Galindo y Ngwompo, 2017). Suponga que dos modelos en BG están conectados en lazo cerrado como se muestra en la figura 3, satisfaciendo las suposiciones 1 y 2. Considere dos EU asociadas a estos modelos en BG, Sª(0, 1, TF, GY) y ![]() (0, 1, TF, GY) dadas por (4). Entonces, una EPU equivalente interna (0, 1, TF, GY,
(0, 1, TF, GY) dadas por (4). Entonces, una EPU equivalente interna (0, 1, TF, GY, ![]() para el sistema en lazo cerrado, satisfaciendo P1 y P2 es,
para el sistema en lazo cerrado, satisfaciendo P1 y P2 es,
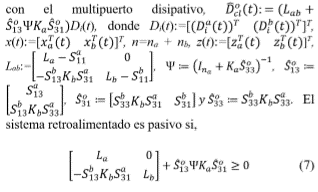
Más aún, para sistemas estrictamente propios, esto es, para ![]() = 0, la desigualdad (7) se reduce a,
= 0, la desigualdad (7) se reduce a,
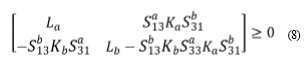
En el siguiente Corolario se resuelve el problema de colocación de polos para una clase particular de sistemas, asignando un polinomio característico deseado a la función de transferencia de lazo cerrado. Se asume que las entradas y las salidas de la planta son linealmente independientes.
Corolario 1 (Galindo y Ngwompo, 2017). Bajo las suposiciones del Teorema 1, además asuma que la planta es estrictamente propia, esto es, ![]() =0,
=0, ![]() ,
, ![]() y
y ![]() el polinomio característico de lazo cerrado deseado de la función de transferencia de
el polinomio característico de lazo cerrado deseado de la función de transferencia de ![]() a
a ![]() donde
donde![]() Entonces, la función de transferencia de
Entonces, la función de transferencia de ![]() ,
,

La ganancia de la referencia,
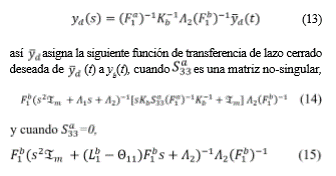
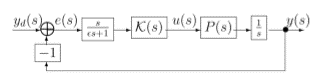
Figura 4. Configuración retroalimentada de un grado de libertad para seguimiento de la referencia.
A continuación se da un ejemplo de CBP de un sistema de dos masas (Galindo y Ngwompo, 2017) aplicando el Teorema 1 y el Corolario 1.
APLICACIÓN A UN SISTEMA DE DOS MASAS
De acuerdo a la suposición 1, se seleccionan salidas y referencias de velocidades, cuyo producto es potencia, para que el sistema retroalimentado sea pasivo (Beaman y Rosenberg, 1988), cuando todos los elementos son pasivos. Este control es aplicado para salidas de posición utilizando una aproximación de una derivada, como se muestra en la figura 4, donde 0 < ε ∈ℜ es un parámetro real relativamente pequeño.

Figura 6. Modelo en BG aumentado de un sistema de dos masas, resortes y amortiguadores.
Considere el sistema de dos masas mostrado en la figura 5, donde ![]() i=1, 2, son las masas, los coeficientes de rigidez y fricción, respectivamente,
i=1, 2, son las masas, los coeficientes de rigidez y fricción, respectivamente, ![]() son fuerzas aplicadas a
son fuerzas aplicadas a ![]() y
y ![]() respectivamente, y
respectivamente, y ![]() son las velocidades de
son las velocidades de ![]() y
y ![]() respectivamente. Sin las resistencias
respectivamente. Sin las resistencias ![]() y sin los bonds en líneas discontinuas que las conectan, la figura 6 muestra un modelo en BG de este sistema. En relación a aplicar el Teorema 1 y el Corolario 1, asegurando que
y sin los bonds en líneas discontinuas que las conectan, la figura 6 muestra un modelo en BG de este sistema. En relación a aplicar el Teorema 1 y el Corolario 1, asegurando que ![]() sea una matriz no-singular, se agregan resistencias
sea una matriz no-singular, se agregan resistencias ![]() relativamente grandes como se muestra en la figura 6. La EU de este modelo en BG aumentado es,
relativamente grandes como se muestra en la figura 6. La EU de este modelo en BG aumentado es,
En relación a controlar posiciones utilizando el control anterior diseñado para velocidades, el controlador es implementado en MATLAB/Simulink en la configuración retroalimentada de la figura 4, donde los parámetros de la planta son ![]() y
y ![]() . Las posiciones de
. Las posiciones de ![]() y
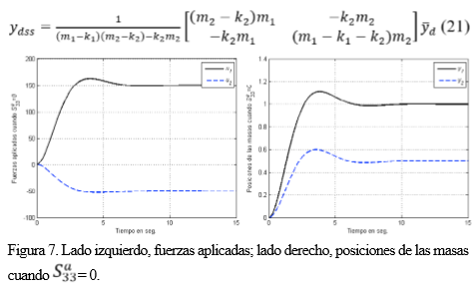
y ![]() y las fuerzas aplicadas se muestran en la figura 7 cuando
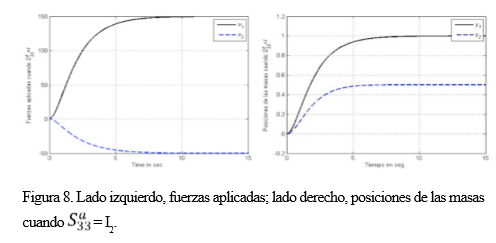
y las fuerzas aplicadas se muestran en la figura 7 cuando ![]() , y en la figura 8 cuando
, y en la figura 8 cuando ![]()
![]() I2, al aplicar la referencia escalón
I2, al aplicar la referencia escalón ![]() Esto se logra con una respuesta estable teniendo error en estado estacionario cero como se muestra en las figuras 7 y 8, y debido a las propiedades de pasividad las fuerzas requeridas son suaves y dentro de un rango admisible. Las oscilaciones iniciales de las posiciones de
Esto se logra con una respuesta estable teniendo error en estado estacionario cero como se muestra en las figuras 7 y 8, y debido a las propiedades de pasividad las fuerzas requeridas son suaves y dentro de un rango admisible. Las oscilaciones iniciales de las posiciones de ![]() y
y ![]() de la figura 7 se deben al polinomio característico asignado
de la figura 7 se deben al polinomio característico asignado ![]() y pueden eliminarse seleccionando en su lugar
y pueden eliminarse seleccionando en su lugar ![]() con un tiempo de respuesta mayor. Por otro lado, una respuesta suave se muestra en la figura 8, donde el polinomio característico deseado de la función de transferencia de
con un tiempo de respuesta mayor. Por otro lado, una respuesta suave se muestra en la figura 8, donde el polinomio característico deseado de la función de transferencia de ![]() a
a ![]() es
es ![]() y en este caso es asignado libremente.
y en este caso es asignado libremente.
DISCUSIÓN
La proposición constructiva mostrada en la figura 1 asegura que todos los elementos del sistema acepten causalidad integral predefinida, y además simplifica la EU debido a que se satisface la suposición 2. Sin esta proposición, las EPU de lazo cerrado no serían manejables, dificultando la obtención de las condiciones de pasividad. Cuando se agregan Rs parásitas, se agregan elementos casi cero en el multipuerto disipativo, que pueden eliminarse después de obtener las condiciones de pasividad. Además, cuando se agregan Cs o Is, el sistema aumentado es singularmente perturbado y las dinámicas rápidas agregadas deberán ser estables de acuerdo al Teorema de Tikhonov (Kokotovik, Khalil y O’Reilly, 1999). Estos elementos parásitos agregan elementos 1/ε en F, donde ε ∈ℜ es un parámetro de perturbación relativamente pequeño que remplaza los Cs e Is agregados. Se ha desarrollado la ecuación de estado del sistema y el estado quasiestacionario (Galindo y Ngwompo, 2017), o alternativamente en el enfoque de BG (González, 2016). Más aún, todos los elementos aceptan causalidad derivativa predefinida en el modelo en BG singularmente perturbado (González, 2016) satisfaciendo las condiciones para determinar el modelo quasiestacionario.
Las EU propuestas asociadas a modelos en BG presentadas en la proposición 2 tienen significado físico. La estructura del controlador dada por (4) tiene la estructura de la planta, simplificando su implementación. Este controlador dinámico utilizado en una configuración retroalimentada de salida es más sencillo de implementar que el controlador (Gawthrop, 1995) que utiliza BG en un marco genérico basado en observador para el diseño de controladores en el dominio físico.
Sea H una función Hamiltoniana de la energía total, entonces z(t)=∂H / ∂x(t) y del Lema 1 se deduce que![]() para obtener un sistema de puerto Hamiltoniano disipativo (Van der Schaft y Jeltsema, 2014), asegurando pasividad, por lo que el Teorema 1 da una solución más general permitiendo que
para obtener un sistema de puerto Hamiltoniano disipativo (Van der Schaft y Jeltsema, 2014), asegurando pasividad, por lo que el Teorema 1 da una solución más general permitiendo que ![]() en el sistema en lazo cerrado, mientras que en el Corolario 1,
en el sistema en lazo cerrado, mientras que en el Corolario 1, ![]() y
y ![]() . El Teorema 1 y el Corolario 1 son un enfoque alternativo al de puerto Hamiltoniano disipativo.
. El Teorema 1 y el Corolario 1 son un enfoque alternativo al de puerto Hamiltoniano disipativo.
Por otro lado, el Corolario 1 muestra que el polinomio característico de la función de transferencia de ![]() a
a ![]() puede ser asignado libremente cuando
puede ser asignado libremente cuando ![]() y logra una colocación restringida de los polos cuando
y logra una colocación restringida de los polos cuando ![]() . En este último caso la implementación de este controlador estrictamente propio es más sencilla dado que
. En este último caso la implementación de este controlador estrictamente propio es más sencilla dado que ![]() . Cuando
. Cuando ![]() , el coeficiente fijo del polinomio característico satisface
, el coeficiente fijo del polinomio característico satisface ![]() debido a que
debido a que ![]() es una matriz simétrica y
es una matriz simétrica y ![]() es una matriz antisimétrica. Esto es consistente con la condición de (10), y en este caso conduce a una condición más sencilla comparada con la que requiere que
es una matriz antisimétrica. Esto es consistente con la condición de (10), y en este caso conduce a una condición más sencilla comparada con la que requiere que ![]() y una condición de conmutabilidad adicional (Galindo, 2015).
y una condición de conmutabilidad adicional (Galindo, 2015).
Las EPU propuestas permiten obtener las condiciones de pasividad, que implican la estabilidad del sistema. Sin embargo, puede haber sistemas estables que no sean pasivos, por lo que resta por investigar cuáles de las condiciones obtenidas están directamente relacionadas con la estabilidad del sistema.
CONCLUSIONES
Se presenta un enfoque general para el análisis de pasividad y el diseño de CBP de sistemas lineales con fuentes internas moduladas, modelados por BG. El enfoque está basado en EPU propuestas, que son una representación alternativa para EU no conservativas asociadas a modelos en BG, en las cuales todos los elementos disipativos y fuentes internas moduladas son incluidos en un multipuerto disipativo. La propiedad de pasividad de su matriz constitutiva de este multipuerto resultante determina la propiedad de pasividad del sistema completo. Se investiga la configuración en lazo cerrado, que puede ser utilizada recursivamente en el diseño de sistemas mecatrónicos o de control complejos. Se muestra que el método provee una guía para la selección de la estructura del controlador y la asignación de parámetros relevantes. El resultado muestra que las EPU propuestas logran estabilidad robusta. Se dan aplicaciones de este resultado cuando la planta y el controlador están descritos por EU propuestas.
Los resultados muestran que la condición de pasividad del sistema en lazo cerrado permite sintonizar los parámetros de control cuando se consideran únicamente fuentes externas de potencia después de la interconexión. Se propone una aproximación de la derivada para controlar salidas de posición cuando el controlador es diseñado para el control de velocidades. Los resultados muestran que se resuelve el problema de control de seguimiento cuando el controlador es diseñado en el dominio físico. Más aún, se considera el problema de asignación de polos para una clase particular de sistemas utilizando la representación propuesta. Las EPU en la representación de sistemas de lazo cerrado proveen un marco de referencia para el diseño de controladores avanzados en el dominio físico. Control óptimo, control basado en energía o control de sistemas híbridos basados en modelos de promedios pueden ser abordados utilizando este enfoque. Investigaciones posteriores pueden realizarse para desempeño robusto y para extensiones a sistemas no-lineales.
* Universidad Autónoma de Nuevo León.
Contacto: rgalindoro@gmail.com
REFERENCIAS
Beaman, J.J., y Rosenberg, R.C. (1988). Constitutive and modulation structure in bond graph modeling. J. of Dynamic Systems, Measurement and Control. 110:395-402.
Brogliato, B., Lozano, R., Maschke, B., et al. (2007). Dissipative Systems Analysis and Control, Theory and Applications. SpringerVerlag.
Dauphin-Tanguy, G., Rahmani, A., y Sueur, C. (1999). Bond graph aided design of controlled systems. Simulation Practice and Theory. 7:493-513.
Donaire, A., y Junco, S. (2009). Energy shaping, interconnection and damping assigment, and integral control in the bond graph domain. Simulation Modeling Practice and Theory. 17:152-174.
Galindo, R. (2015). Stabilization of matrix polynomials. Int. J. of Control. 88(10):1925-1932.
Galindo, R., y Ngwompo, R.F. (2017). Passivity based control of linear time-invariant systems modelled by bond graph. Int. J. of Control. 91(2):420-436.
García, J., Rimaux, S., y Delgado, M. (2006). Bond graphs in the design of adaptive passivity-based controllers for dc/dc power converters. IEEE Int. Conf. on Industrial Technology. 132-137.
Gawthrop, P.J. (1995). Bond graph based control. In Proc. of IEEE Conf. on Systems Man and Cybernetics. Pp. 3011-3016.
González, G.A. (2016). A bond graph model of a singularly perturbed LTI MIMO system with a slow state estimated feedback. Proc. of the IMechE Part I: J. of Systems and Control Eng. 230(8):799-819.
González, G.A., y Galindo, R. (2009a). A bond graph model from a state space description of a LTI MIMO system. Methods and Models in Automation and Robotics. 19-21.
González, G., y Galindo, R. (2009b). Removing the algebraic loops of a bond graph model. Proc. of the Inst. of Mechanical Eng. (IMechE) Part I: J. of Systems and Control Eng. 222(6):543-556.
Karnopp, D., y Rosenberg, R. (1975). System Dynamics: A Unified Approach. John Wiley and Sons.
Kokotovik, P., Khalil, H.K., y O’Reilly, J. (1999). Singular Perturbations Methods in Control: Analysis and Design. Society for Industrial and Applied Mathematics.
Lamb, J.D., Woodall, D.R., y Asher, G.M. (1997). Bond graphs ii: Causality and singularity. Discrete Applied Mathematics. 73:143173.
Li, P.Y., y Ngwompo, R.F. (2005). Power scaling bond graph approach to the passification of mechatronic systems-with application to electrohydraulic valves. ASME J. of Dynamic Systems, Measurement and Control. 127(4):633-641.
Lin, C.T. (1974). Structural controllability. IEEE Trans. Autom. Control. 19:201-208.
Ngwompo, R.F., y Galindo, R. (2017). Passivity analysis of linear physical systems with internal energy sources modelled by bond graphs. Proc. of the IMechE Part I: J. of Systems and Control Eng. 23(I):14-28.
Ortega, R., y García, E. (2004). Interconnection and damping assignment passivity-based control: A survey. European J. of Control. 10:432-450.
Roberts, D.W., Balance, D.J., y Gawthrop, P.J. (1995). Design and implementation of a bond-graph observer for robot control. Control Eng. Practice. 3(10):1447-1457.
Sueur, C., y Dauphin-Tanguy, G. (1989). Structural controllability/ observability of linear systems represented by bond graphs. J. of Franklin Inst. 326:869-883.
Van der Schaft, A., y Jeltsema, D. 2014. Port-Hamiltonian Systems Theory: An Introductory Overview. Foundations and Trends R in Systems and Control. 1(2-3):173-378.
Vijay, P., Samantaray, A.K., y Mukherjee, A. (2009). A bond graph model-based evaluation of a control scheme to improve the dynamic performance of a solid oxide fuel cell. Mechatronics. 19:489-502.