Construcción de un picosatélite cansat
ÁNGEL COLÍN*, BÁRBARA BERMÚDEZ REYES*, GORKI ENCARNACIÓN MORROBEL**, GERARDO LIRA IBARRA*, DARÍO ZÚÑIGA ROSALES*, LUIS ÁVALOS DE LA CRUZ*, MARCELO VILLARREAL MÉNDEZ*, JOCELYN MENDOZA MARTÍNEZ*** Y BRENDA ÁLVAREZ ARCE***
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016
Los cansat son conocidos en casi todo el mundo. Su principal objetivo es transmitir a los estudiantes universitarios los conceptos básicos de diseño y construcción de satélites artificiales. La mayoría de las universidades más importantes de diversos países que cuentan con una facultad de ingeniería y ciencias exactas han construido al menos uno de estos dispositivos como actividad extraescolar para sus alumnos, mediante cursos, talleres o a través de los programas de capacitación que las agencias espaciales ofrecen para captar las futuras generaciones de ingenieros y científicos en el área espacial (Walker et al., 2010).
La historia de diseño y construcción de cansat en México es muy reciente, comienza apenas en 2013, cuando la Red Universitaria del Espacio (RUE), de la Universidad Nacional Autónoma de México (UNAM), organizó su primer concurso interno (UNAM 2013). En 2014, la Agencia Espacial Mexicana (AEM) realizó un proyecto de capacitación en sistemas de ingeniería aplicados a una misión cansat (AEM, s.d.), en la que participaron más de 50 profesores de todo el país con la finalidad de que los profesores capacitados difundieran estos conocimientos a los estudiantes de sus universidades. La rápida y creciente aceptación por parte de la comunidad académica dio como resultado una serie de concursos regionales y nacionales como los organizados por el Centro Universitario de Ciencias Exactas e Ingenierías (CUCEI) de la Universidad de Guadalajara en 2015; para 2016 se realizó un concurso por parte de la AEM y otro por la Escuela de Ciencias de la Ingeniería y Tecnología (ECITEC) de la Universidad Autónoma de Baja California (UABC) (Sánchez et al., 2016). Es un hecho que estos concursos irán tomando mayor importancia con el paso del tiempo. Para este año se espera tener mayor afluencia en cada uno de los eventos; hasta ahora, se tienen registrados únicamente dos concursos nacionales: el que organizó el CUCEI en junio y el que se llevará a cabo en octubre de 2016, organizado por la Universidad Autónoma de Nuevo León (UANL).
En la actualidad, la UANL forma parte de un comité de expertos certificados (2016) encargados de organizar y gestionar anualmente un concurso nacional de picosatélites, dicho concurso se realiza en una institución diferente cada año. Estos eventos nos conducirán paulatinamente a adquirir experiencia para participar en las competencias internacionales que se llevan a cabo en Europa, Estados Unidos, etcétera (ESA, 2016; ARLISS, 2016).
En este artículo se presenta la descripción física y la construcción de un picosatélite cansat, elaborado en junio de 2016, durante el segundo programa de entrenamiento teórico-práctico que la UANL ofreció a estudiantes universitarios.
DESCRIPCIÓN FÍSICA Y ARQUITECTURA DE UN PICOSATÉLITE CANSAT
Un cansat consiste en una plataforma que simula un sistema espacial; en este caso, es un picosatélite que cabe en una lata de refresco.
Estos simuladores de satélite no son puestos en órbita, pero pueden lanzarse a diferentes alturas mediante un cohete, globo sonda, aeromodelo o multirrotor de control remoto. Durante su descenso, deben transmitir información por telemetría hacia una estación terrena conectada a una computadora portátil.
Los diseños y configuraciones de un cansat son muy variados, debido a que dependen del tipo de misión que se realizará. Una misión puede consistir únicamente en transmitir datos, efectuar retornos controlados o probar pequeños mecanismos de despliegue. En la figura 1 se muestran los componentes principales que constituyen los subsistemas de un cansat: de arriba abajo y de izquierda a derecha: a) subsistema de computadora, b) subsistema de comunicación, c) subsistema de la misión y d) subsistema de potencia con microcámara.

Figura 1. Configuración básica de los cuatro subsistemas de un cansat (elaboración
de los autores).
A continuación se describe cada uno de los subsistemas anteriores: a) Subsistema de la computadora, compuesto por microcontrolador Arduino Promini 328 y un chip Atmega328 a 8 MHz. b) Subsistema de comunicación, con antena XBee y protocolo de comunicaciones Zigbee (IEEE 802.15.4) y GPS (Global Position System, por sus siglas en inglés) modelo GP635T. c) Subsistema de la misión, con sensor de temperatura y humedad DHT11, acelerómetro ADXL345, giroscopio L3G4200D, compás HMC5883L y barómetro BMP085. d) Subsistema de potencia, con batería de polímero de litio de 3.7 V a 1.2 mAh y microcámara 808 Car Key, para video-fotografía, con resolución de 720×480, y cuenta con su propia batería. Cada uno de los subsistemas está conectado entre sí para formar el sistema completo (figura 2). En la figura 3 se observa el ensamble, listo para ser introducido en una lata de refresco. Por conveniencia el lenguaje de programación utilizado en la configuración de todo el sistema fue Arduino v1.6.6.
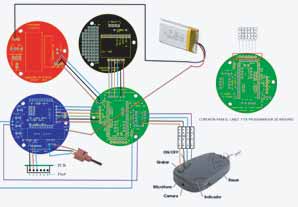
Figura 2. Diagrama esquemático de conexiones para el sistema completo
(cortesía del ECITEC-UABC).
Es importante considerar que el mecanismo de descenso es un elemento adicional, externo al sistema integrado. El paracaídas de la figura 4 está sujeto en los orificios que se hicieron en la parte superior de la lata.
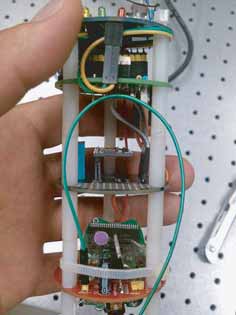
Figura 3. Ensamble completo de un cansat (elaboración de los autores).

4. Paracaídas sujetado en la lata de refresco (elaboración del autor).
Con este modelo de paracaídas se realizó un análisis básico de su funcionamiento. Para ello se consideraron las condiciones ambientales en el interior del edificio de la Facultad de Ciencias Físico Matemáticas (FCFM). La densidad del aire, ρ = 1.1647, fue estimada tomando en cuenta una temperatura de 29°C, con una presión de 1019 hPa, humedad relativa 58% y un punto de rocío de 19.91°C. Al desplegarse el paracaídas, la masa total del cansat, m = 114 g, estará sometida a la acción de su peso y a una fuerza de rozamiento k proporcional al cuadrado de la velocidad. Para este caso particular, k = 1.94. Bajo estas condiciones, la fuerza de resistencia o de arrastre D produjo una velocidad vertical de descenso ve ~ 1.2 m/s, de acuerdo a las siguientes ecuaciones
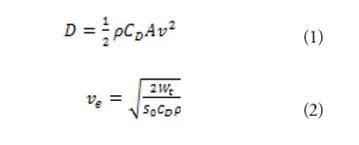
donde:
![]()
es el coeficiente de arrastre: A es el área transversal del objeto; v es la velocidad; Wt es el peso total y So es la superficie del paracaídas. Mientras que, para determinar la velocidad en cada instante a partir del despliegue, empleamos
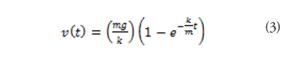
donde: t es el instante de tiempo y g es la gravedad.
Para confirmar la entera funcionalidad del dispositivo, se realizaron dos lanzamientos, hacia el interior de la FCFM, desde una altura de 12 m, como se muestra en la figura 5. Un tercer lanzamiento fue hecho desde la azotea de un edificio contiguo hacia el exterior y desde una altura de 15 metros, como se muestra en la figura 6.

Figura 5. Lanzamiento hacia el interior de la FCFM (elaboración del autor).

Figura 6. Lanzamiento hacia el exterior de la FCFM (elaboración del autor).
RESULTADOS
Los tres lanzamientos fueron consecutivos y sin desactivar el subsistema de potencia, esto con el fin de recabar toda la información de los sensores de forma continua, por lo que la misión completa tuvo una duración aproximada de 180 segundos, contando desde la preparación en el laboratorio hasta el último punto de aterrizaje. Por conveniencia, cada lanzamiento fue hecho manualmente por uno de los participantes, mientras que el resto de ellos permaneció junto a la estación terrena, para la recepción y recuperación del cansat. Los resultados obtenidos se muestran en la figura 7 y en las gráficas de la figura 8. En la figura 7 se muestra una fotografía tomada con la microcámara durante el descenso en el tercer lanzamiento. Se puede apreciar parte de una pista deportiva y el cerro del Topo Chico en el horizonte. En la gráfica, que representa la altura, se observan tres acontecimientos, correspondientes a cada lanzamiento; los primeros 45 segundos fueron empleados para trasladar el dispositivo desde el laboratorio, que se encuentra en el primer piso del edificio, hasta el punto de lanzamiento en la azotea, ubicado a 12 m de altura (indicada en metros sobre el nivel del mar). El tiempo de vuelo en el primer evento fue, aproximadamente, de diez segundos hasta el punto de aterrizaje; caso muy similar para el segundo evento. Mientras que para el tercero, el tiempo fue más prolongado (alrededor de dos minutos), debido al traslado a un edificio contiguo con 15 m de altura. La duración del vuelo en este último fue de 13 segundos, aproximadamente.

Figura 7. Fotografía tomada durante el descenso en el tercer lanzamiento
(elaboración de los autores).
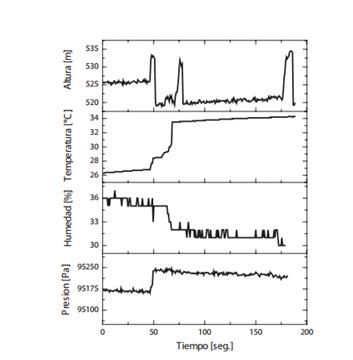
Figura 8. Resultados obtenidos durante toda la misión. De arriba abajo: altura (sobre nivel del mar), temperatura, humedad y presión (elaboración de los autores).
En la gráfica de temperatura se observa un pequeño cambio trascurrido el primer minuto. Esta diferencia de –8°C se debe al cambio del ambiente al que estaba sometido el dispositivo entre las condiciones controladas del laboratorio y la temperatura exterior, por lo cual se consideró como constante. En contraste, en la humedad relativa se observa una disminución de –5%, causada por las mismas condiciones ambientales. El cambio de presión registrado en el interior y exterior del laboratorio fue de apenas –75 Pa en promedio, por lo que resultó ser poco significativo.
CONCLUSIONES
Los programas de capacitación y entrenamiento para construir picosatélites educativos cansat se están incrementando cada año en nuestro país. Es evidente que la aceptación por parte de la comunidad académica en ciencias e ingeniería contribuye en gran medida a poner en práctica esta actividad multidisciplinaria para los estudiantes universitarios.
La importancia de estos dispositivos es que constituyen el primer paso hacia la exploración de la tecnología espacial a un costo muy reducido, comparado con cualquier proyecto que esté destinado hacia el espacio. Un cansat proporciona los conocimientos básicos y los principios de operación esenciales de una misión espacial. Además, puede ser diseñado y construido, utilizando una variedad de componentes electrónicos comerciales.
En la actualidad, varias instituciones mexicanas cuentan con profesores calificados para realizar diseños y cursos de capacitación en este tema. Hay siete profesores que han obtenido una certificación internacional (CLTP7, 2015), reconocida por el Consorcio de Universidades para la Ingeniería del Espacio (University Space Engineering Consortium) (UNISEC, 2015). Tres de estos profesores han formado el capítulo UNISECMéxico (2016), el cual se ha establecido para crear una red nacional e internacional de colaboración entre estudiantes y profesores en actividades académicas y proyectos educativos que estén relacionados con el espacio.
AGRADECIMIENTOS
Este trabajo fue financiado, en parte, por Promep (proyecto: DSA/103.5/14/10812) y por la Agencia Espacial Mexicana (proyecto: Conacyt-AEM-2014-01- 248438). Los autores agradecen al M.C. Leopoldo Pineda, por facilitar el laboratorio de física moderna.
* Universidad Autónoma de Nuevo León.
** Universidad APEC.
*** Universidad Autónoma de Baja California.
Contacto: angel.colin@fcfm.uanl.mx
REFERENCIAS
AEM. (s.d.). Líderes cansat México. Consultado el 7 de julio de 2016. http://www.educacionespacial.aem.gob.mx/mapa_ Cansat.html
AEM. (2016). Consultado el 11 de julio de 2016. http:// www.educacionespacial.aem.gob.mx/
ARLISS. (2016). Consultado el 7 de octubre de 2016 http:// www.arliss.org/
CLTP7. (2015). The 7th CanSat Leader Training Program. Consultado el 13 de julio de 2016 http://cltp.info/
ESA. (2016). Cansat. Consultada el 7 de julio de 2016. http:/ /www.esa.int/Education/CanSat
NASA. (2014). Small Spacecraft Technology State of the Art. National Aeronautics and Space Administration, California. Technical TP-2014-216648. Consultada el 7 de julio de 2016. http://www.nasa.gov/sites/default/files/atoms/ files/small_spacecraft_technology_state_of_the_ art_2015_tagged.pdf
Sánchez C., Á.E. et al. (2016). Picosatélites educativos cansat: Primer Concurso Nacional en México, Celerinet, año 4, vol. VII, pp. 20-28.
Twiggs R. (1998). University Space System Symposium (USSS), Hawaii, USA.
UNAM. (2013). Misiones cansat 2013. Consultado el 7 de julio de 2016. http://rue.unam.mx/Eventos/Realizados/ CANSAT/Misiones%20Cansat2013.pdf
UNISEC. (2015). The Fourth UNISEC-Global Meeting. Consultado el 13 de julio de 2016. http://www.unisecglobal.org/
UNISEC-Mexico. (2016). Members UNISEC Mexico. Consultado el 7 de octubre de 2016 http://www.unisec.mx/ #ourteam
Universidad de Guadalajara. (2015). Invitación a participar en el Concurso CanSat CUCEI. 2015 Consultado el 11 de julio de 2016 https://www.youtube.com/watch?v=G9BBp Ru1los
Walker, R. et al. (2010). ESA hands-on space education project activities for university students: Attracting and training the next generation of space engineers. IEEE EDUCON Conference, Madrid. Consultado el 19 de noviembre de 2015 http://ieeexplore.ieee.org/stamp/stamp.jsp?tp= &arnumber=5492406&isnumber=54923361