IMPACTO DEL CONTROL AUTOMÁTICO E INTELIGENCIA ARTIFICIAL

María Aracelia Alcorta García*
CIENCIA UANL / AÑO 22, No.96 julio-agosto 2019
Laimportanciadelcontrolautomático de procesos, en nuestros días, radica en la reducción del costo asociado a la generación de bienes y servicios, ya que produce un incremento en la calidad y volúmenes de producción de una planta industrial, y estabiliza el comportamiento de las variables que participan en los procesos, lo cual repercute en la reducción de consumo de energía y tiempo. Otro beneficio indirecto del control automático radica en la seguridad industrial de los trabajadores y su salud a corto, mediano y largo plazo, reduciendo la rotación de personal y aumentando el tiempo libre en actividades importantes para la empresa. Otro aspecto que no se puede dejar de mencionar es el logro de una vida con más comodidades y enfocada al mantenimiento de la salud. La eliminación de errores y un aumento en la seguridad de los procesos es otra contribución del uso y aplicación de las técnicas de control.
Es importante destacar que anterior a la aplicación masiva de las técnicas de control automático en la industria, el hombre aplicaba sus capacidades de cálculo, e incluso su fuerza física, para la ejecución del control de un proceso o máquina asociada a la producción. En la actualidad, gracias al desarrollo y aplicación de las técnicas modernas de control, un gran número de tareas y cálculos asociados a la manipulación de las variables ha sido delegado a computadoras, controladores y mecanismos especializados para el logro de los requerimientos del sistema. El control de procesos requiere, en muchos casos, la intervención de personal humano para conseguir determinados objetivos de alto nivel (seguridad, calidad, producción). La automatización exige que el sistema de control pueda reemplazar al operador en esas tareas –o auxiliarle–, para lo que se precisa gran potencia en el manejo del conocimiento que se tiene del proceso y habilidades específicas (Sanz et al., 1991). En este tipo de situaciones, el control inteligente ofrece perspectivas interesantes, ya que es capaz de suministrar metodologías que permiten realizar, de forma automática, algunas de las tareas realizadas típicamente por el ser humano. El principio de todo sistema de control automático es la aplicación del concepto de realimentación o feedback (medición tomada desde el proceso que proporciona información del estado actual de la variable que se desea controlar), cuya característica especial es la de mantener al controlador central informado del estado de las variables para generar acciones correctivas cuando sea necesario, como se puede ver en la figura 1.
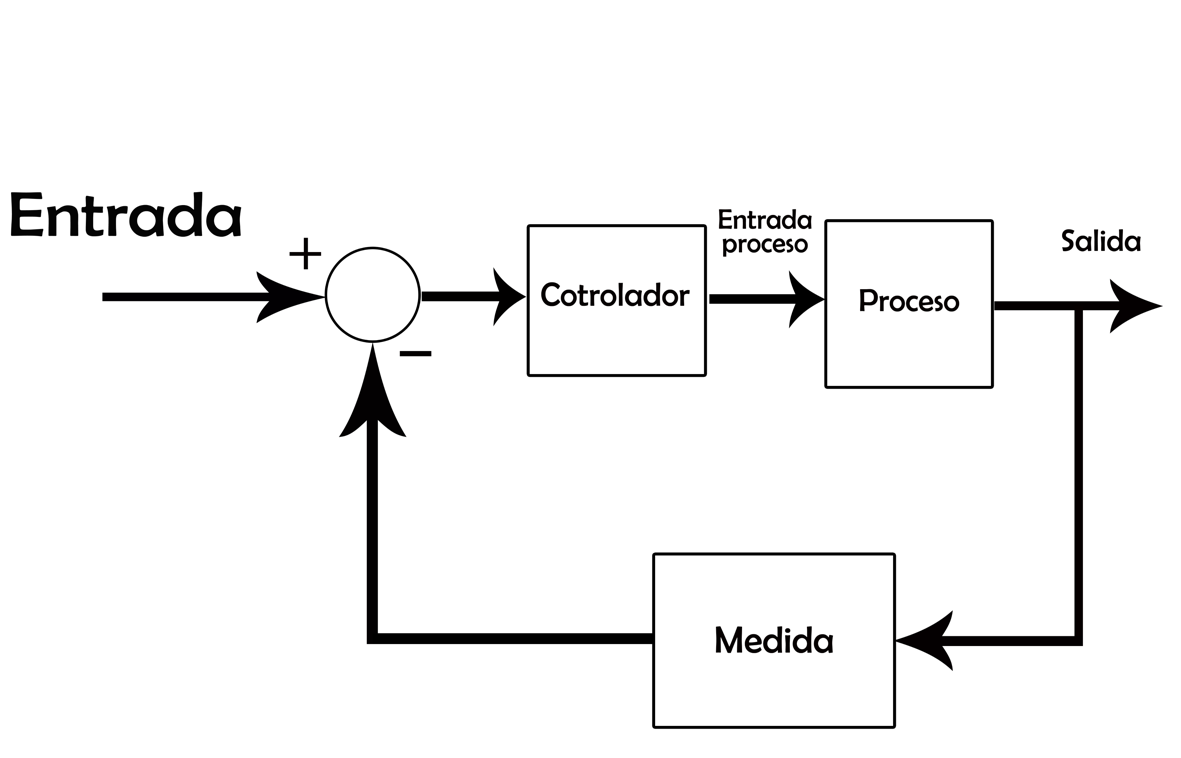
Figura 1. Sistema retroalimentado.
Este mismo principio se aplica en campos tan diversos como el control de procesos químicos, control de hornos en la fabricación del acero, control de máquinas y herramientas, control de variables en el área de la salud, en el control de la trayectoria de un proyectil militar e incluso en los sistemas de navegación de barcos, submarinos, satélites artificiales entre otros.

ANTECEDENTES
Hasta la Revolución Industrial, el diseño de los sistemas de control se realizaba mediante prueba y error, unido con una gran aportación de intuición ingenieril. De tal manera que era más un arte que una ciencia. En la mitad del siglo XVIII, la matemática fue utilizada para analizar la estabilidad de los sistemas de control realimentado (Orozco y Corella, 2014; Kirk, 1998). Como la matemática es el lenguaje formal de la teoría del control automático, se conoce al periodo previo a ese tiempo como la prehistoria de la teoría del control. De tal forma que hasta finales del siglo XIX el control automático se caracterizó por ser eminentemente intuitivo.
El deseo de mejorar las respuestas transitorias y la exactitud de los sistemas de control, obligó a desarrollar las teorías de los sistemas de control.
A continuación se presenta una breve cronología de las ecuaciones del control automático (Orozco y Corella, 2014):
La teoría moderna de control se basa en el análisis y síntesis en el dominio del tiempo. Utilizando variables de estado. Actualmente, la tendencia de los sistemas de control es hacia la optimización y hacia la digitalización total de los controladores. En artículos y bibliografía sobre control es posible observar la gran diversificación del control moderno, como las técnicas de control lineal y no lineal, control óptimo, estocástico, control robusto, control por inteligencia artificial, control adaptable, con amortiguamiento, control de estructura variable, control de eventos discretos, con retardos, entre otros. El avance es vertiginoso tanto en teoría como en la práctica del control.
DESCRIPCIÓN DEL PROBLEMA DE CONTROL
El problema de control consiste en tener un proceso que sea representado por un sistema dinámico de ecuaciones (es decir, un sistema de ecuaciones diferenciales, en función del tiempo), regido por una variable de estado dependiente del tiempo (x(t)), ésta representa el comportamiento de algún proceso determinado (por ejemplo: naturaleza de temperaturas de un proceso térmico, regulación de un proceso químico, acabado de un maquinado, ángulo de giro de un volante, trayectoria de un objeto, velocidad de algún fluido, etc.), en el cual se requiere un comportamiento adecuado para que el proceso se desempeñe en forma eficiente, minimizando una función costo, cuadrática. Esta función de costo contiene la energía empleada por el estado y la energía empleada por la entrada de control para mantener el comportamiento de la variable de estado. El proceso se encuentra dentro de la famosa “caja negra”, no lo podemos ver, sin embargo, sabemos que hay entradas y salidas (figura 2), siendo el objetivo del control asegurarnos de que la variable de estado se comporte adecuadamente (tome los valores apropiados, de acuerdo al proceso).
Figura 2. Representación gráfica general del planteamiento del problema de control.
¿Qué es el control automático óptimo?
En otras palabras, el control automático es el mantenimiento de un valor deseado de una variable, en un proceso, dentro de una cantidad o condición, midiendo el valor existente, comparándolo con el valor deseado y utilizando la diferencia para proceder a reducirla (acción de control). En consecuencia, el control automático exige un lazo cerrado de acción y una reacción que funcione sin intervención humana. Se llama control óptimo al que dentro de sus objetivos se encuentra, además de lograr los valores adecuados de la variable a controlar, el de optimizar, es decir, minimiza o maximiza una función criterio J. En el control óptimo se pretende maximizar ganancias y minimizar costos y energía, según trate el proceso en cuestión a controlar.
El caso más simple es el caso lineal, para el cual el sistema dinámico de ecuaciones que contiene toda la información del proceso toma la forma:

donde x(t)∈Rn, u(t)∈Rm, A(t) es una matriz de dimensión nxn y B(t)es una matriz nxm.
Algunas ecuaciones de control para este caso se presentan en Kirk (1998). Y están dadas por:

Con función costo a minimizar dada por:

donde H,Q son matrices de peso, simétricas, reales, semidefinidas, positivas, y R es matriz de peso real, simétrica, definida, positiva. Como se puede observar, la función de costo a minimizar contiene la energía del estado dada porxT (t)Qx(t) y la energía empleada por el control: uT (t)Ru(t), así como la posición del estado en tiempo final.
El estado óptimo controlado x*(t) se obtiene sustituyendo el control óptimo u* (t)en la ecuación (1):

Donde u* (t) es el control óptimo, el cual pertenece a un espacio de control es admisibles U(t).
Otro aspecto importante a considerar es la presencia de disturbios dentro de los procesos, los cuales quedan fuera del control. Algunos ejemplos pueden ser los factores ambientales, como la humedad y la temperatura, éstos pueden influir en el proceso, si no es considerado algún acondicionamiento especial. Otros factores que quedan fuera de control son los errores de los instrumentos de medición, los cuales están siempre presentes. Todo este tipo de situaciones, y algunas otras, causan disturbios en los procesos, afectándolos, éstos se representan como términos de difusión dentro de la ecuación de estado del sistema. Algunos ejemplos de términos de difusión son los ruidos blancos (caracterizados por ser gaussianos con media cero y varianza σ2), los más utilizados, actualmente se cuenta con la representación de otros tipos como los ruidos rosados, cafés, etcétera, dependiendo de la función de distribución a la que se relacionen
El control para este tipo de sistemas, con presencia de disturbios, es llamado control estocástico. Cuando el sistema dinámico tiene la forma

Donde , yε es un parámetro que puede
tomar diferentes valores, incrementando o decreciendo la intensidad del término de difusión (o ruido blanco), el cual es denotado pordW/dt.Este planteamiento corresponde al problema risk-sensitive, para el cual la solución al problema de control, como se puede ver en Alcorta, Basin y Acosta (2010), está dada por la ley de control óptimo risk-sensitive:


Donde el término P(t) es la solución de la ecuación diferencial matricial:

C(t) es la solución de la ecuación diferencial vectorial:
Y la función costo exponencial cuadrática a minimizar está dada por:

Donde E indica el valor esperado, exp indica exponencial,I es la matriz identidad de dimensiones adecuadas yεes el parámetro que aparece en la ecuación de estado como coeficiente del término de difusión.
Ejemplos de controles incluidos en algunos equipos.
Un tostador automático es un sistema de control de lazo abierto, que está controlado por un regulador de tiempo. El tiempo requerido para hacer tostadas debe ser anticipado por el usuario, quien no forma parte del sistema. El control sobre la calidad de la tostada (salida) es interrumpido una vez que se ha determinado el tiempo, el que constituye tanto la entrada como la acción de control.
Un mecanismo de piloto automático y el avión que controla, forman un sistema de control de lazo cerrado (por realimentación). Su objetivo es mantener una dirección específica del avión, a pesar de los cambios atmosféricos. El sistema ejecutará su tarea midiendo continuamente la dirección instantánea del avión y ajustando automáticamente las superficies de dirección del mismo (timón, aletas, etc.), de modo que la dirección instantánea coincida con la especificada. El piloto u operador, quien fija con anterioridad el piloto automático, no forma parte del sistema de control.
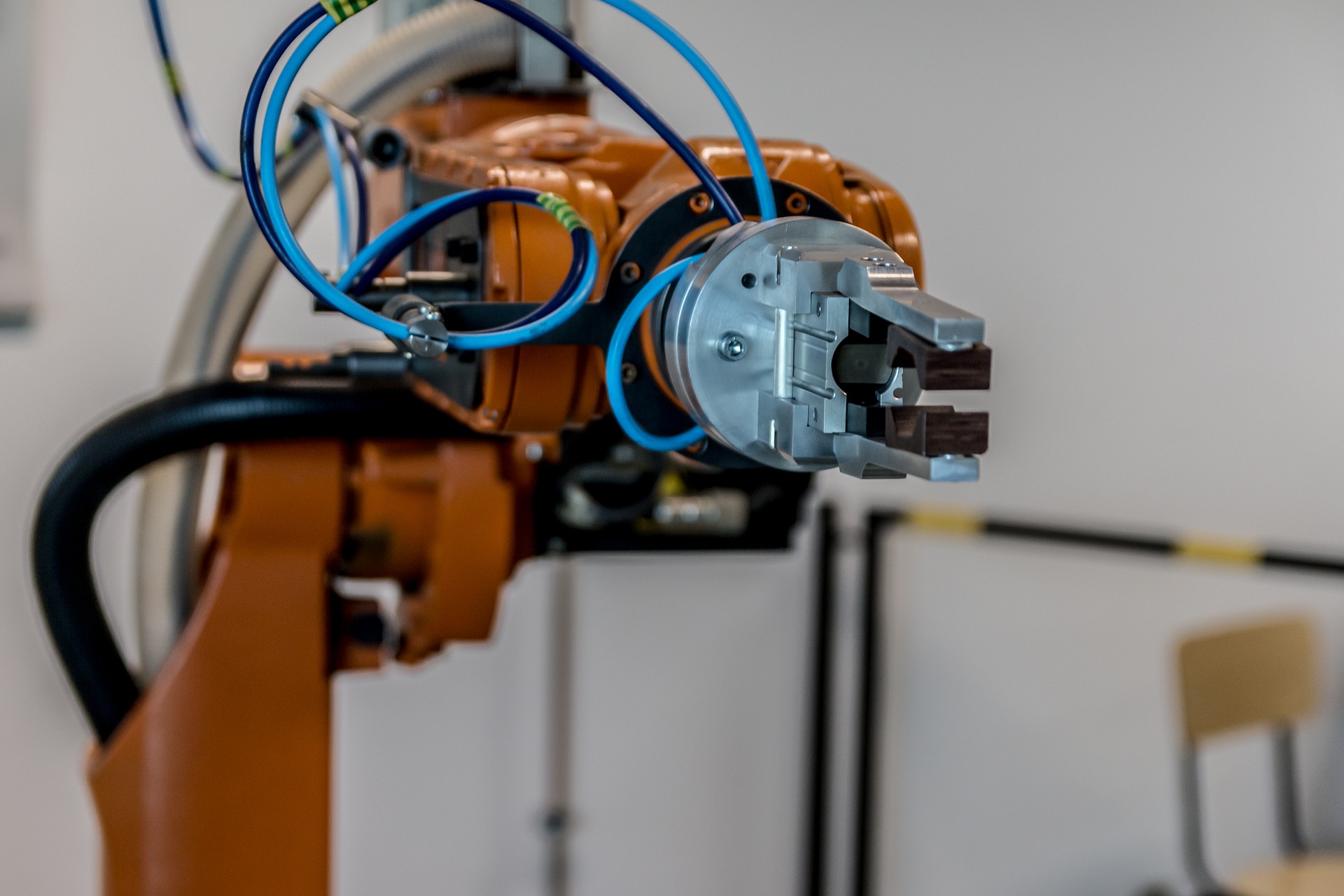
En la figura 3 se puede apreciar el control efectuado por el ser humano en una central térmica; en la figura 4 el control se efectúa por medio de robots.

Figura 3. Control manual en una central térmica.

Figura 4. Robots industriales KUKA usados en la producción de alimentos para una panadería.
La ingeniería automática es un área multidisciplinar que se encarga de la concepción y desarrollo de autómatas y de otros procesos automáticos.
La ingeniería automática se encarga de la automatización de procesos técnicos en las siguientes áreas:
• Electrónica e industria eléctrica
• Domótica
• Procesos químicos
• Ingeniería mecánica
• Automovilismo
• Aeronáutica y astronáutica
• Robótica
• Medicina
• Mecatrónica
Dentro de la ingeniería automática se encuentran, entre otras, las siguientes subdisciplinas:
• Instrumentación automática
• Tecnología de sensores
• Regulación automática
• Control de procesos
• Vigilancia
• Etcétera
INTELIGENCIA ARTIFICIAL
Como se puede ver en Alcorta, Basin y Acosta (2010), los avances en el campo del control automático, aplicados a la inteligencia artificial (IA), la electrónica, sensores, procesamiento de señales, actuadores, etcétera, proporcionan nuevas herramientas para el control de sistemas complejos. La metodología de control es el conjunto de técnicas y procedimientos usados para construir o implementar un controlador para un sistema dinámico. La metodología puede incluir tanto el diseño del procedimiento de control como el tipo de algoritmos/hardware utilizados para su implementación final (Passino, 1993). Para muchos sistemas inteligentes de control, la metodología de diseño del controlador es esencialmente heurística y basada en ciertos principios de la inteligencia artificial o la investigación operativa.
Las metodologías de control inteligente incluyen, por ejemplo, la lógica difusa, sistemas expertos (control basado en reglas), aprendizaje, sistemas de planificación para control, algoritmos de búsqueda, sistemas híbridos, diagnóstico de fallas y reconfiguración, autómatas, redes de Petri, redes neuronales, algoritmos genéticos, etcétera. Algunas de las metodologías de control inteligente incluyen o son una síntesis de las desarrolladas para el control convencional. La IA se puede definir como el estudio de las facultades mentales a través del uso de modelos computacionales. Este término surge en 1950, ideado por un grupo de científicos que estudiaron el cerebro humano como modelo natural, integrando la cibernética y los computadores (McCarthy, Minsky, Newell, Simon). Desde entonces, los investigadores en el campo de la IA han generado ideas y técnicas muy útiles para el control y, a su vez, el desarrollo de la IA se ha visto estimulado en su interacción con el control de procesos. En particular, el control automático puede hacer efectivo el uso de:
- Nuevas técnicas y entornos avanzados de programación
- Técnicas para tratar la heurística
- Nuevos sistemas hardware
- Avances en la electrónica y las comunicaciones
Los procedimientos de modelado, análisis, diseño, simulación, etcétera, de los sistemas de control son un área natural para la aplicación de los métodos de la IA. Hoy en día, la mayoría de los métodos de la IA están bien delimitados y muchos de ellos han sido aplicados con éxito al diseño y control de sistemas. En ocasiones, se ha propuesto una combinación de dos o más de ellos como solución, como se puede apreciar en Albertos y Sala (2004) y Villagrá et al. (2010).
EJEMPLOS DE LA APLICACIÓN DE INTELIGENCIA ARTIFICIAL
El proyecto de automóvil autónomo de Google y la función de “piloto automático” de Tesla son dos casos de inteligencia artificial que han aparecido en las noticias últimamente, y que forman parte de nuestra vida cotidiana.

Figura 5. IA en automóviles.
El objetivo es que, eventualmente, el automóvil pueda “mirar” el camino por delante y tomar decisiones basadas en lo que ve, aprendiendo durante el proceso.
Otro ejemplo es Google Photosel, que permite buscar sus ‘fotos’ en las fotos. Facebook reconoce las caras, al igual que Snapchat Face Swap.
Figura 6. IA en reconocimiento de imágenes.
Se trataba de una aplicación que consiste en proporcionar ayuda a personas con discapacidad visual, este prototipo inicial reconoce lo que está delante del usuario y luego se lo describe de nuevo. Porsupuesto, para los especialistas en marketing los usos podrían ser múltiples, desde la búsqueda de contenido hasta experiencias innovadoras de los clientes. Google cuenta también con este sistema, por ejemplo, si haces una búsqueda con la palabra “gato”, te saldrán solamente imágenes de gatos.
El paso final del desarrollo de AI es construir sistemas que puedan formar representaciones sobre ellos mismos. En última instancia, el objetivo de los investigadores de IA no sólo es comprender la conciencia, sino construir máquinas que la tengan.
CONCLUSIONES
El área de control automático ha demostrado sus múltiples aplicaciones en diversos aspectos de la vida cotidiana, lo cual ha llevado a impulsar la tecnología en todas las áreas como la industrial, medio ambiente, espacial, salud, etcétera. Abriéndose cada vez más oportunidades para llevar a cabo la aplicación y desarrollo de nuevas técnicas de control que, junto con el desarrollo de la IA, impulsan extraordinariamente los avances científicos y tecnológicos. Siendo cada vez más los procesos complejos que se pueden controlar y automatizar, haciendo la vida más cómoda y dando más condiciones para conservar la salud. Razón por la cual cada vez se requiere de más personal altamente motivado y capacitado en ésta área.
*Universidad Autónoma de Nuevo León.
Contacto: maaracelia@gmail.com
REFERENCIAS
Albertos, P., y Sala, A. (2004). El control difuso: una metodología integradora. RIAI. 1(2): 22-31.
Alcorta, M.A.G., Basin, M.V., y Acosta, G.S. (2010). Risk-sensitive approach to optimal filtering and control for linear stochastic systems. IJICIC. Doi: 10.1109/ICICIC.2008.659.
Kirk, D.E. (1998). Optimal Control Theory. An Introduction. Mineola N.Y. USA.: Ed. Dover Publications Inc.
Orozco, L., y Corella, J. (2014). Historia de los sistemas de control. Universidad de las Fuerzas Armadas, Ecuador. Disponible en: http://image.slidesharecdn.com/deber2historia141110223929-conversion-gate01/95/historia-de-los-sistemas-de-control-1-638.jpg?cb=1415659306.
Passino, K.M. (1993). Bridging a gap between conventional and intelligent control. IEEE Control Systems Magazine. 13(3): 12-18. Doi: 10.1109/37.214940.
Santos, M. (2011). Aplicaciones exitosas de control inteligente a casos reales. Revista Iberoamericana de Automática e Informática Industrial. Elsevier. 00: 1-8.
Sanz, R., Jiménez, A., Galán, R., et al. (1991). Puente. Introducción al control inteligente de procesos. Informática y Automática. 24(1).
Villagrá J., Milanés V., Pérez J., et al. (2010). Control basado en PID inteligentes: aplicación al control robusto de velocidad en entornos urbanos. RIAI. 7(4): 44-52.