ICARUS
ÓSCAR MARTÍNEZ HERNÁNDEZ, NOEL DEL ÁNGEL POLANCO*, ERIL A. PAULÍN RODRÍGUEZ*, PABLO NIETO MARTÍNEZ*, ELIU BENÍTEZ HERNÁNDEZ* Y RICARDO CASTILLO PÉREZ*
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016
RESUMEN
El objetivo de este proyecto es diseñar y construir un picosatélite cansat que pueda ser capaz de recolectar y transmitir datos de telemetría y posicionamiento global a una estación terrena móvil dentro de un smartphone, combinando algunas de las tecnologías que son aplicadas en comunicación inalámbrica (Zigbee y wifi). Se pretende que los datos de interés (presión, temperatura, humedad, posicionamiento global, etcétera) sean desplegados gráficamente en la aplicación móvil durante el lanzamiento y descenso del cansat, con intervalos de lecturas de los datos de al menos 0.5 segundos. Otro objetivo del proyecto es la recuperación del cansat después del lanzamiento.
Palabras clave: picosatélite, cansat, smartphone, wifi.
ABSTRACT
Design and build a CanSat Picosatellite able to receive and broadcast Telemetry and Global positioning data to a mobile station inside a Smartphone, along with ZigBee and Wi-Fi which are applied technologies for wireless communication so the device will be able to display graphically in a mobile app important data (Pressure, Temperature, Humidity, Global Positioning, etc.) during the launch and landing of the Can Sat, with data reading lapses of at least 0.5 seconds, as well as the recovery of the device.
Keywords: Picosatellite, CanSat, Smartphone, wi-fi.
Este cansat trabaja con los requerimientos necesarios para el envío de datos de telemetría y posicionamiento global (GPS). El segmento de vuelo está constituido por una computadora de vuelo que utiliza un microcontrolador ESP8266 encapsulado en una tablilla compacta denominada ESP12-Q, a la cual se le incorpora un GPS, el sensor BMP180 y otros dispositivos para procesar los datos y obtener los valores de posicionamiento global, temperatura interna y externa, presión, latitud y altitud relativa –como lo haría un satélite convencional– (Walker et al., 2010).
La estación terrena ha sido diseñada y desarrollada a través de una aplicación móvil, la cual despliega, en tiempo real, los datos recopilados del cansat en un smartphone o PC, con esto se logra un despliegue de datos más amigable, ágil y versátil. La aplicación ha sido desarrollada con tecnología web; para poder hacerla llegar a su destino combina la transferencia de datos entre tres protocolos de comunicación inalámbrica: Zigbee (IEEE 802.15.4), transmisión de video de 5.8 GHz y wifi (Domoprac, 2016; Pluralsigth, 2016).
MOTIVACIÓN DEL PROYECTO
El motivo para el desarrollo de este cansat, esencialmente, es que en la zona sur de Tamaulipas, compuesta por las ciudades de Tampico, Madero y Altamira, los temas relacionados con la tecnología espacial son escasos, y el peso académico de la mayoría de las líneas de investigación está estrechamente relacionado al área petroquímica e industrial.
Otras motivaciones son el reto para combinar varias tecnologías típicas para la transmisión de datos de forma inalámbrica, con el uso de los protocolos Zigbee (IEEE 802.15.4) y wifi. Así como programar y diseñar nuestra propia estación terrena mediante el software Node.js e IONIC (Nómadas electrónicos, 2015), para crear una aplicación capaz de representar los datos de telemetría del cansat en cualquier dispositivo, en cualquier parte del mundo, por medio de internet, ya sea una PC o un smartphone, como lo hiciera cualquier estación terrena.
OBJETIVO DE LA MISIÓN
Desarrollar una aplicación móvil que cumpla las características de una estación terrena capaz de representar los datos de telemetría y posicionamiento global transmitidos de un cansat al combinar varias tecnologías de comunicación inalámbrica. Éxito mínimo: trasmisión de datos entre el cansat y la estación terrena cada segundo y transmisión de video a estación terrena.
Éxito medio: retransmitir y procesar datos durante el lanzamiento y descenso de 1/2 segundo por muestreo. Éxito máximo: envío y procesamiento de información entre los protocolos de comunicación inalámbrica Zigbee y wifi desplegados gráficamente en la aplicación móvil y en el ordenador usados como estación terrena durante el lanzamiento y descenso del cansat, y recuperación del mismo.
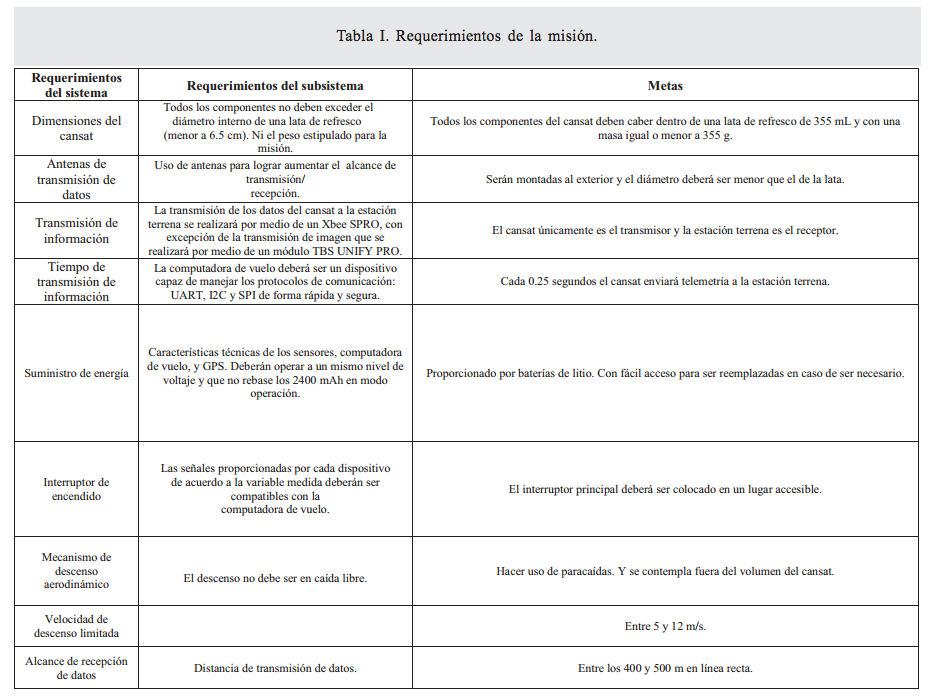
REQUERIMIENTOS DE LA MISIÓN DE TELEMETRÍA
La misión debe cumplir con los requisitos que se detallan en la tabla I (las tablas y figuras en este trabajo fueron realizadas por los autores).
GESTIÓN DEL PROYECTO
Para poder lograr el funcionamiento del sistema Icarus se requiere el manejo de diferentes protocolos de comunicación y para ello se siguió el diagrama de operación de nuestro dispositivo que se muestra en la figura 1.

Figura 1. Diagrama de Operación de Icarus.
DESGLOSE DE ACTIVIDADES DE LOS INTEGRANTES DEL EQUIPO
En la figura 2 se muestra el organigrama de cada una de las actividades necesarias para el desarrollo de este proyecto.
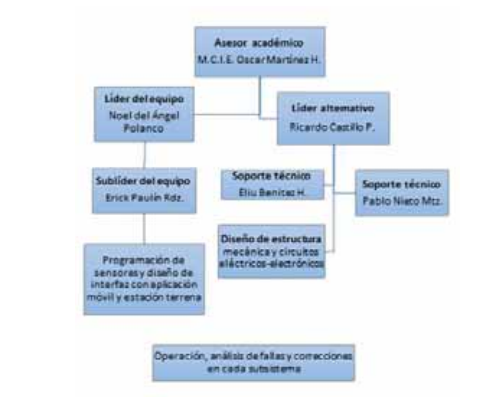
Figura 2. Organigrama del proyecto.
DESCRIPCIÓN FÍSICA Y ARQUITECTURA DEL PROYECTO
Arquitectura del sistema cansat
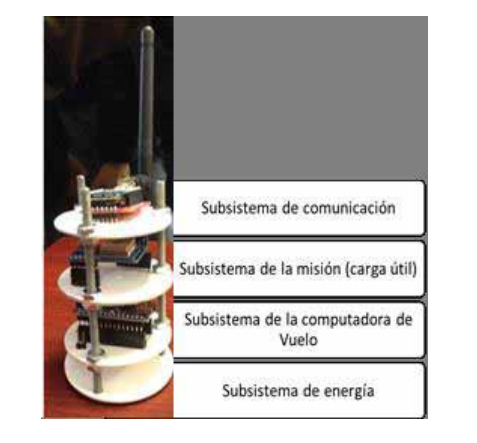
Figura 3. Arquitectura del sistema cansat.
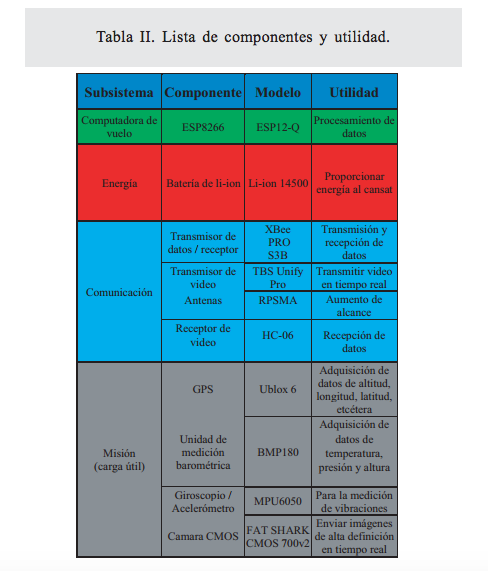
Lista de componentes en cada subsistema
El proyecto está dividido en varios subsistemas cada uno, con un determinado conjunto de componentes. En la tabla II se muestra una lista de componentes.
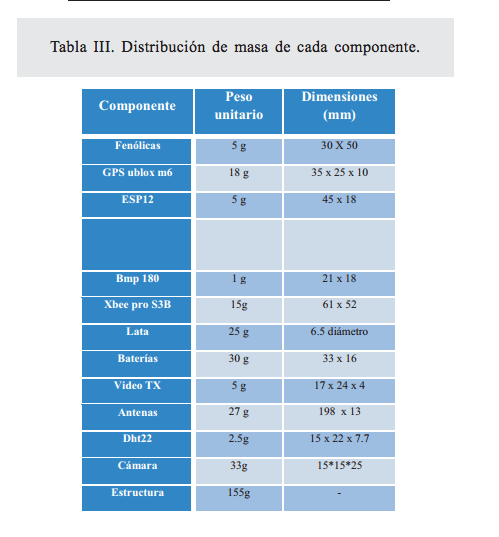
Distribución de masa
Con base en los lineamientos del proyecto fue necesario realizar una tabla (véase tabla III) con los pesos de los componentes.
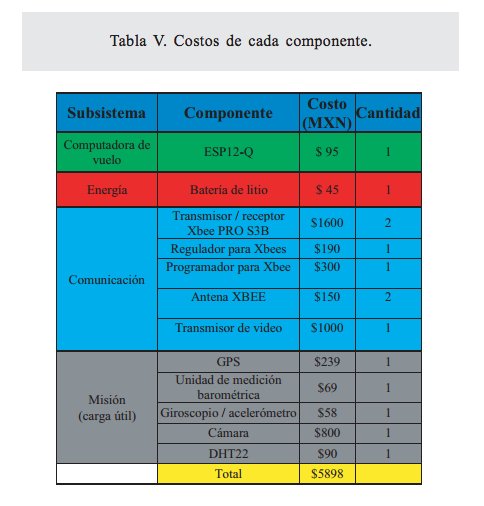
Costo de cada componente
Integración de los subsistemas
En la figura 4 se muestra un diagrama que detalla la interacción de los subsistemas que componen el proyecto.

Figura 4. Interacción de subsistemas.
A continuación se explica brevemente la secuencia a seguir de cada subsistema para lograr que la misión sea exitosa.
SUBSISTEMA CANSAT
Se realiza la medición de las diversas variables físicas mediante el uso de sensores. Las lecturas serán colectadas por la computadora de vuelo basada en el MCU esp8266 (Nómadas electrónicos, 2015) y, posteriormente, enviadas mediante un módulo emisor Xbee (Hangar, 2012). La transmisión de video será encendida por la computadora de vuelo, pero será transmitida independientemente por una conexión directa entre la cámara y el módulo TBS Unify (Team Blacksheep, 2016).
SUBSISTEMA ESTACIÓN TERRENA
Se procede a la recepción de datos mediante un módulo receptor Xbee, posteriormente se realiza el tratamiento de datos –recepción, proceso, empaquetado– en un pequeño servidor portable. También recibe los datos de video mediante un receptor análogo con pantalla y los reenvía mediante un servicio de websockets (Phoboslab, 2013).
SUBSISTEMA CLIENTE PC O DISPOSITIVO MÓVIL
La aplicación Icarus realizará el desempaquetado y presentación de datos numérica y gráficamente. Y estará disponible para poder acceder a los datos y video en tiempo real desde la red local, y estamos trabajando en el acceso desde Internet.
RESULTADOS Y DISCUSIÓN
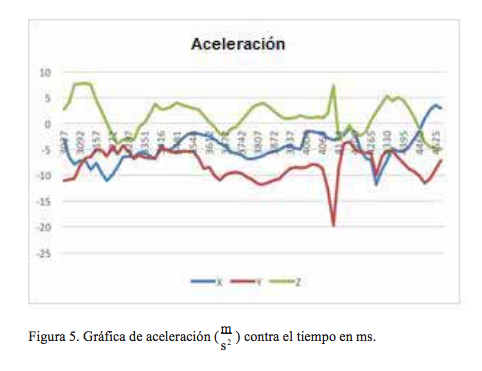
Se precisó enfocar la transferencia de información en un alto muestreo del sensor MPU6050 (acelerómetro y giroscopio) (Naylamp Mechatronics, 2016), se obtenían 46 muestras por segundo de los seis ejes, como se muestra en la figura 5.
En esta figura se presentan los datos de los tres ejes del acelerómetro. Son 70 muestras de cada eje a lo largo de 1520 milisegundos. Las vibraciones no parecen ser críticas, pero en algunos puntos llegan a tener altos cambios. No se aplicaron filtros.
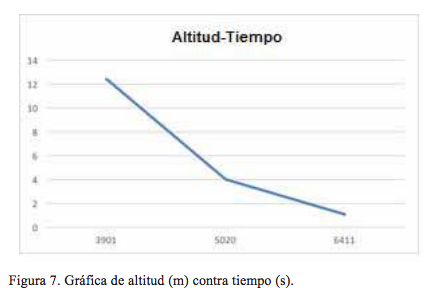
El resto de las mediciones se recibieron cada segundo (figuras 6 y 7). Debido a que la prueba fue de baja altitud se obtuvieron resultados sin cambios significativos. La prueba se realizó a 12 metros y el tiempo de caída fue de poco más de dos segundos.
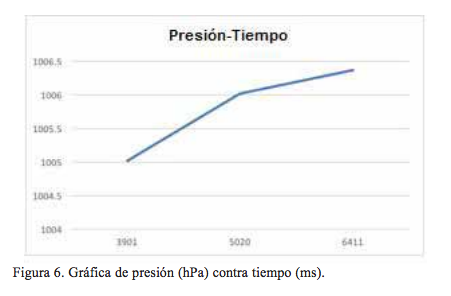
Debido al corto tiempo de caída sólo se tomaron tres muestras de presión (ver figura 6), que equivalen a altitudes desde 12.5 hasta un metro (si la presión a partir de la cual se mide es 1006.5hPa), como se muestra en la figura 7.
CONCLUSIONES
Los resultados obtenidos nos permiten darnos cuenta que el manejo de los diferentes sistemas de comunicación inalámbrica pueden ser aplicadas a una misión cansat; con ello logramos tener el conocimiento necesario para poder utilizarla en otros campos, como la medicina espacial y la comunicación satelital, entre otros.
Cabe mencionar que las conclusiones de este documento son preliminares, ya que se seguirá trabajando en el diseño de la aplicación, la distribución de componentes de cada subsistema y, por ende, en el diseño mecánico de nuestro cansat, además de adherir algunos filtros y procesamiento de datos necesarios para obtener información de mejor calidad para el análisis.
Finalmente, el desarrollo de los satélites educativos cansat permite a la zona sur del estado de Tamaulipas (Tampico, Madero, Altamira) acercarse a los temas relacionados a la tecnología espacial.
AGRADECIMIENTOS
Agradecemos al IEST por las facilidades dadas en el desarrollo de este proyecto. Al MCIE Óscar Martínez Hernández por las asesorías brindadas en cada etapa desarrollada.
* Instituto de Estudios Superiores de Tamaulipas.
Contacto: oscar.martinez@iest.edu.mx
REFERENCIAS
Domoprac. (2016). Protocolos de red: tipos y utilidades. Consultado el 4 de agosto de 2016. http://www.domoprac.com/protocolos-decomunicacion-y-sistemas-domoticos/protocolos-de-red-tipos-yutilidades.html
Hangar. (2012). Arduino + Xbee; primeros pasos. Consultado el 10 de agosto de 2016. https://hangar.org/webnou/wp-content/uploads/ 2012/01/arduino-xbee-primeros-pasos.pdf
Naylamp Mechatronics. (2016). Tutorial MPU6050, acelerometro, y giroscopio. Consultado el 11 de agosto de 2016. http:// www.naylampmechatronics.com/blog/45_Tutorial-MPU6050- Aceler%C3%B3metro-y-Giroscopio.html
Nómadas electrónicos. (2015). ESP8266-Wifi para microcontroladores. Consultado el 4 de agosto de 2016. https://nomadaselectronicos. wordpress.com/2015/03/08/esp8266-wifi-para-microcontroladores/
Phoboslab. (2013). Html5 live video streaming via websockets. Consultado el 11 de agosto de 2016. http://phoboslab.org/log/2013/ 09/html5-live-video-streaming-via-websockets
Pluralsigth. (2016). How to get started with Ionic framework on Mac and Windows. Consultado el 4 de agosto de 2016. https:// www.pluralsight.com/blog/softwaredevelopment/ionic-frameworkon-mac-and-windows
Team Blacksheep. (2016). TBS Unify Pro 5G8 (HV) Video Tx. Consultado el 10 de agosto de 2016. http://www.team-blacksheep.com/ tbs-unify-pro-5g8-manual.pdf
Walker, R., et al. (2010). ESA Hands-on Space Education Project Activities for University Students: Attracting and Training the Next Generation of Space Engineers, IEEEEDUCON, Education Engineering, 1699-1708.
Recibido 8-8-16
Aceptado 10-9-16