IGNICIÓN 2.0
JUAN JULIO CÉSAR CAMPAS BUITIMEA*, GUSTAVO ADOLFO CASTILLÓN RAMÍREZ*, GERMAN GARZÓN MANJARREZ*, ERICK ALBERTO MÉNDEZ MENDOZA*, CHRISTIAN ARTURO SAAVEDRA CEBALLOS* Y SILVIA KARINA REYES LIO*
CIENCIA UANL / AÑO 19, No. 81, SEPTIEMBRE-OCTUBRE 2016
RESUMEN
Se diseñó un cansat que actuará como sonda y que, con ayuda de sensores y un arduino, recolectará diversos parámetros relativos a las condiciones para la vida en ambientes aún no habitados. Posterior a la recolección y el descenso se publicará una base de datos en una página web de acceso público para aquellos interesados en dicha información. El cansat debe ser capaz de soportar las condiciones del lugar de aterrizaje hasta el momento de recuperación, por lo que se apoyará de celdas solares para suministrar energía a la batería.
Palabras clave: cansat, base de datos, sensores.
ABSTRACT
We will send a CanSat that will act as a probe and, using sensors and a micro controller, we will collect various parameters relating to the conditions for life in uninhabited environments. After collecting information and the descent, database will be generated and posted on a publicly accessible webpage for those interested in this information. The CanSat must be able to withstand the conditions of its landing until its recovery, so it will build solar cells to supply power to the battery.
Keywords: CanSat, database, sensors.
Un cansat es un picosatélite del tamaño de una lata de 355 mL con capacidad de recopilar datos relativos a su ubicación, para posteriormente ser transmitidos a una estación terrestre donde serán monitoreados por medio de una interfaz gráfica. Las misiones tienen un propósito académico, son llamados “satélites” pero no se encuentran orbitando alrededor de la Tierra. Los cansat se elevan a una altura previamente establecida (por medio de un globo aerostático, un drone, etcétera) para posteriormente ser liberados; cuentan con un sistema de recuperación, un paracaídas, para reducir el impacto sobre la superficie terrestre al momento del aterrizaje (Sánchez et al., 2016). Todos estos procedimientos tienen la intención de simular a un verdadero satélite.
Los satélites cansat se caracterizan por su volumen y zona de operación, mientras que se categorizan por el enfoque de su misión. El primer tipo de misión es de telemetría, y se encarga específicamente de recolectar y transmitir información en tiempo real a una estación terrena para ser procesada y monitoreada según la misión específica del equipo (UANL et al., 2016). El segundo tipo de misión es el de comeback, cuyo objetivo es manufacturar un cansat de telemetría y, además, diseñar e implementar un vehículo tipo Rover, que permita regresar el cansat al punto de partida (UNAM, 2015). Gracias a la simplicidad y al bajo costo de realización, comparado con otro tipo de proyectos espaciales, el cansat es una excelente oportunidad para los estudiantes para iniciarse en el campo aeroespacial, en donde se ponen a prueba diferentes competencias como el diseño y ensamblaje en placas con circuitos impresos (PCB), la programación en diferentes lenguajes, la estructuración e integración de sistemas, el manejo de distintos protocolos de comunicación, así como la implementación de bases de datos y, por supuesto, el trabajo en equipo.
MOTIVACIÓN DEL PROYECTO
Tanto el conocimiento teórico como su aplicación, suelen ser vitales para el crecimiento académico y profesional. Como jóvenes estudiantes nos motiva la experiencia que ofrece participar en actividades que incluyen el desarrollo de trabajo individual al momento de la generación de subsistemas que, posteriormente, pasarán a formar un único sistema como resultado de la comunicación y confianza que caracterizan el trabajo en equipo.
OBJETIVO DE LA MISIÓN
El objetivo es determinar si un cansat tiene la capacidad de ejecutar una exploración del medio ambiente en Marte. La finalidad es adquirir datos que ayuden a evaluar si determinadas zonas pueden ser consideradas como hábitat favorable para el desarrollo de misiones tripuladas.
Éxito mínimo: elevar el cansat a una altura de 400 m, liberarlo y evitar el desplome del dispositivo.
Éxito medio: adquirir las lecturas de todos los sensores (carga útil) en tiempo real, recuperar el cansat y que continúe siendo funcional.
Éxito completo: graficar los datos en Labview para generar una base de datos, así como el video capturado por la cámara y la integridad del satélite al recuperarlo.
REQUERIMIENTOS DE LA MISIÓN
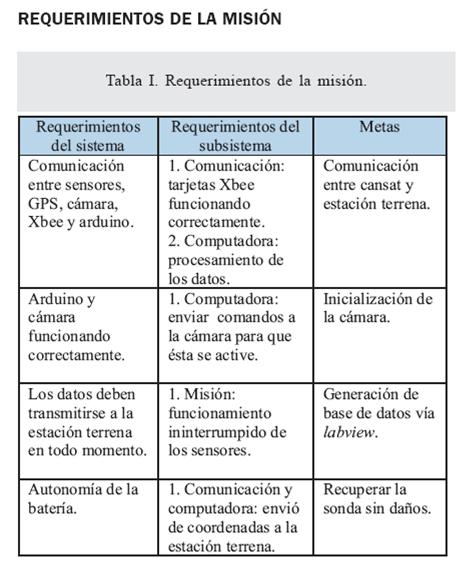
En la tabla I (todas las figuras y tablas son elaboración de los autores) no se especifica el subsistema de energía ya que es un requerimiento fundamental que el sistema esté alimentado en todo momento para cumplir con todas las metas.
GESTIÓN DEL PROYECTO
Existe una serie de actividades que se deben llevar a cabo para la construcción e implementación de un cansat.
1. Adquirir los componentes necesarios.
2. Diseñar una placa PCB para montar los componentes.
3. Concluir el software que controlará los dispositivos/ sensores.
4. Diseñar la estructura mecánica.
5. Ensamblar la placa PCB en la estructura mecánica.
6. Realizar las pruebas necesarias para validar la funcionalidad del satélite.
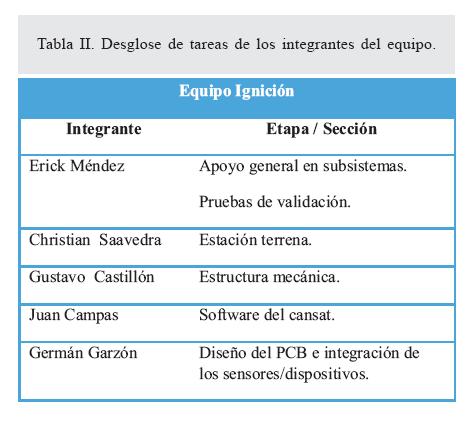
Dichas actividades fueron asumidas por los miembros del equipo y la relación se muestra a continuación.
DESGLOSE DE TAREAS
DESCRIPCIÓN FÍSICA Y ARQUITECTURA DEL PROYECTO
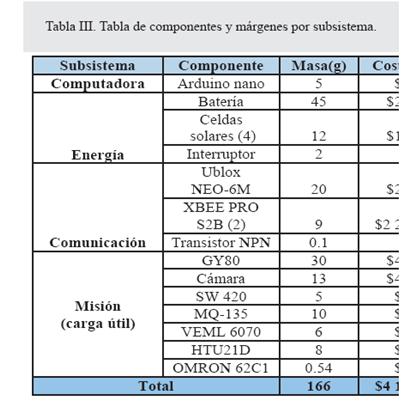
El costo total del proyecto asciende a $4 860 pesos, la tabla III muestra las características de los componentes empleados en cada subsistema, así como todos los aditamentos (pines, PCB, cargador de batería, sockets, etcétera) necesarios para una correcta funcionalidad del satélite.
Subsistema de computadora de vuelo
La computadora de vuelo es un arduino nano, el cual es programado en lenguaje C y controla todos los sensores y dispositivos que conforman el cansat.
Requerimientos
1. Funcionamiento correcto de la placa arduino.
Subsistema de energía
El cansat está alimentado principalmente por una pila de litio de 7.4 V a la cual se le han implementado celdas solares que le permitirán autosustentarse.
La batería suministra energía a la placa arduino que se encarga de alimentar todos los subsistemas y circuitería que necesite voltajes de 5 V (por medio de un regulador que ya tiene integrado), para los sensores que se alimentan con 3.3 V está implementado un regulador de voltaje externo (fi gura 1).
Requerimientos
1. Todos los componentes serán alimentados por una batería.
2. El sistema debe contener celdas solares.
3. La alimentación de los sensores debe ser de 3.3 y 5 volts.
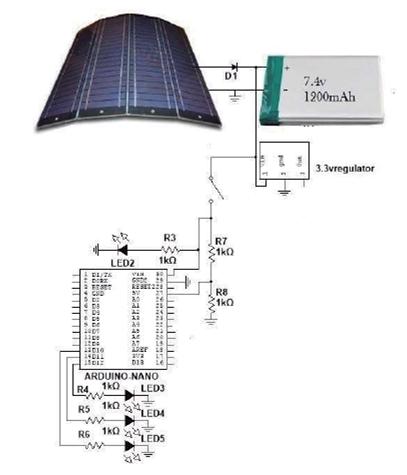
Figura 1. Subsistema de energía.
Subsistema de comunicaciones
El cansat está equipado con dos dispositivos principales que ayudarán a transmitir los datos obtenidos por la carga útil, estos dispositivos son, en primer lugar, un módulo GPS conectado a la computadora principal (arduino) que se encargará de recibir las coordenadas del GPS por el Pin Rx y mediante el pin TX; del mismo microcontrolador se enviarán los datos a través de una tarjeta Xbee Pro S2B directo a la estación terrena –la tarjeta Xbee se activa por medio de transistor NPN (fi gura 2).
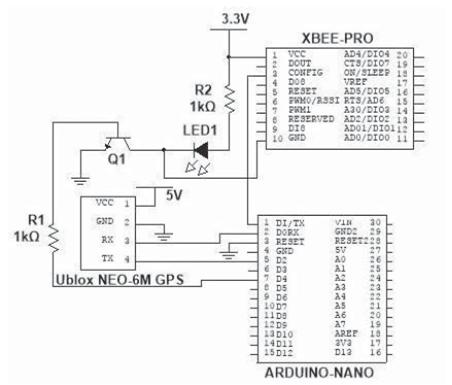
Figura 2. Subsistema de comunicación.
Requerimientos
1. Enviar los datos adquiridos por la carga útil a la estación terrena.
2. Correcto funcionamiento del módulo GPS.
Subsistema de la misión (carga útil)
Este subsistema es el encargado de recaudar todos los datos durante el tiempo de vuelo del cansat (UNAM, 2015) ya que contiene el integrado GY-80, para medir temperatura interna, presión atmosférica y altitud sobre el nivel del mar; el integrado HTU21D para medir la temperatura externa del satélite, así como la humedad relativa; el sensor VEML 6070 que mide la radiación UV; el sensor MQ-135 que se encarga de monitorear la calidad del aire y finalmente un relevador de estado sólido por medio del cual se activa la cámara y se inicializa la captura de audio y video (figura 3).
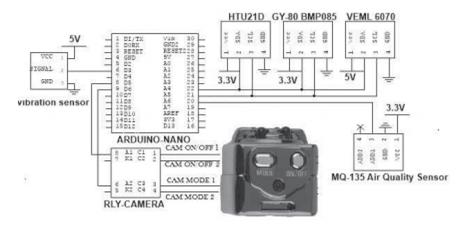
Figura 3. Subsistema de la misión.
Estación terrena
La estación terrena es la plataforma encargada de recibir, monitorear y almacenar los datos enviados por el cansat y se compone de una tarjeta Xbee PRO S2B y una computadora.
Requerimientos
1. Antena Xbee con alcance mínimo de 400 m de distancia.
2. La transmisión no debe tener interferencia.
RESULTADOS Y DISCUSIÓN
Para comprobar que el satélite es capaz de cumplir con su misión, se debe someter a diversas pruebas estando en funcionamiento, las cuales son descritas a continuación:
1. Prueba de vibración: consta en agitar el cansat de manera reiterada y agresiva con el fin de comprobar qué tan fijos están los componentes del sistema.
2. Prueba de fuerza centrífuga: se gira el satélite a una gran velocidad.
3. Prueba de impacto secundario: consiste en golpear la base donde se sitúa el cansat para generar perturbaciones.
4. Prueba de impacto directo: el cansat soporta el golpe contra el suelo derivado de una caída libre a una altura de 10 m.
5. Prueba del paracaídas: comprobar que el paracaídas se abre a tiempo evitando el desplome del satélite.
6. Prueba de la cámara: asegura que se ha grabado el video durante el tiempo de vuelo.
Todas las pruebas fueron superadas con éxito dado que el satélite no perdió comunicación ni dejó de transmitir los datos en ningún momento, por lo tanto, a pesar de las diversas perturbaciones que podría sufrir el dispositivo, e incluso el impacto con el suelo a la hora del descenso, éste se mantiene en óptimas condiciones y completamente funcional.
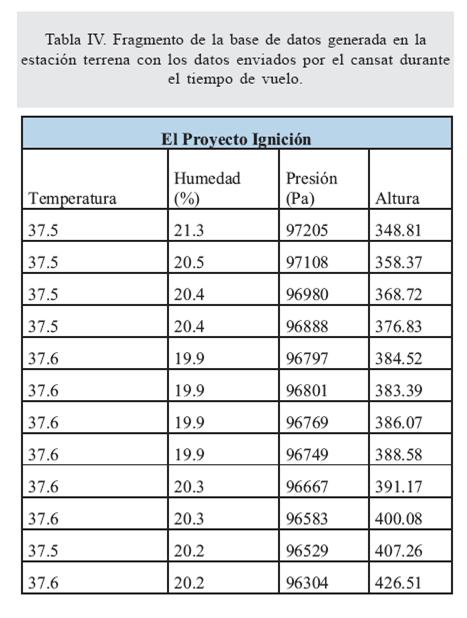
A continuación se muestran las gráficas de ciertos pará- metros transmitidos en tiempo de vuelo del satélite y un fragmento de la base de datos que se creó en Microsoft Access en una de las pruebas realizadas.
CONCLUSIONES
El crear una estructura mecánica es un reto puesto que todos los sensores y dispositivos deben entrar en la lata, permanecer estáticos y operar al mismo tiempo, además de ofrecer una protección ante posibles perturbaciones.
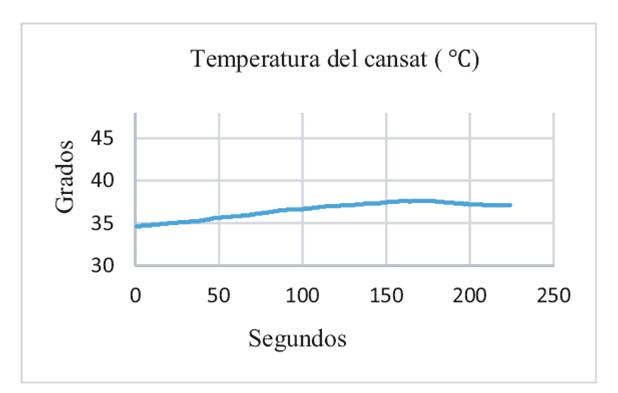
Figura 4. Temperatura monitoreada en tiempo de vuelo.
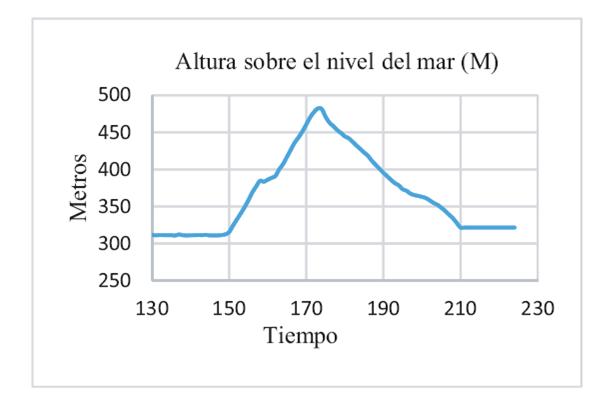
Figura 5. Altura sobre el nivel del mar monitoreada en tiempo de vuelo.
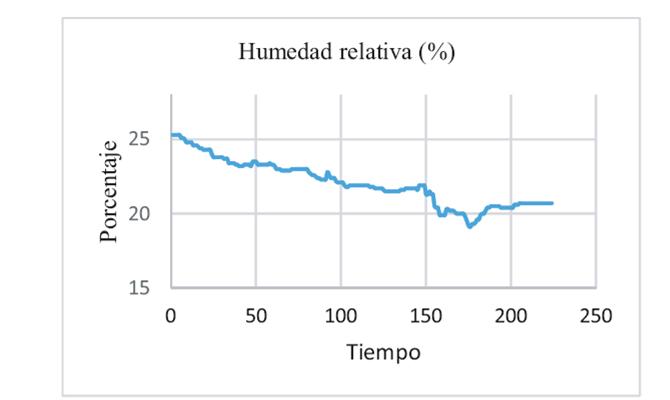
Figura 6. Humedad relativa monitoreada en tiempo de vuelo.
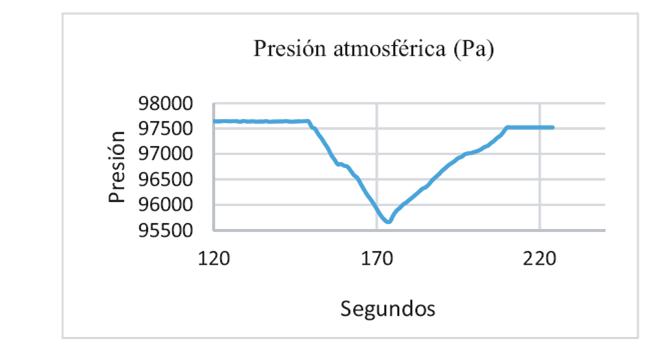
Figura 7. Presión atmosférica monitoreada en tiempo de vuelo.
Los sensores que presentaron problemas fueron el GPS y el sensor de humedad, ya que al demandar más corriente al regulador de 3.3 V, el voltaje disminuía causando que sus lecturas fueran incorrectas o nulas, además de que el módulo GPS sufría la incapacidad de mandar las coordenadas a la placa arduino; después de una ardua búsqueda se encontró que el pin RX del módulo GPS debe ir conectado a un pin digital del arduino de modo que éste funcione como un TX, por lo que la solución fue utilizar el pin 6 digital del arduino como TX y el pin 5 digital como un RX y así conectar el terminal TX del GPS al pin 5 y el RX al pin 6.
Decidimos hacer una relación entre una base de datos en Access y el monitoreo de parámetros en LabView, de forma que todos los valores medidos se almacenaran en dicha base.
Finalmente, logramos que todos los subsistemas funcionaran en armonía y dimos por concluido nuestro cansat.
Se puede decir que gracias al coste de realización moderado, poco tiempo de preparación y simplicidad en comparación con otros proyectos espaciales, este concepto es una excelente oportunidad para estudiantes de dar los primeros pasos en materia espacial.
Son los estudiantes quienes se encargan de seleccionar la manera en la que van a realizar su misión, diseñar el cansat, integrar los componentes, comprobar el correcto funcionamiento, preparar el lanzamiento, analizar los datos y organizarse como equipo distribuyendo la carga de trabajo.
Se trata en definitiva de una reproducción a escala del proceso de diseño, creación y lanzamiento de un satélite real. Por otra parte, fuera de los logros educativos que pueda brindar el proyecto, el otro motivo por el cual la realización del cansat logra ser oportuna es la exploración, ya que gracias a la telemetría se pueden recolectar y transmitir datos de vuelo en tiempo real, lo cual lo hace un dispositivo idóneo para investigar otros planetas, desde la órbita hasta la superficie terrestre. Midiendo diferentes variables como la presión del aire y el porcentaje de oxígeno, es posible construir una imagen de la historia del terreno, además de que se puede ejecutar la misión en diferentes partes y abarcar un terreno más amplio en menos tiempo.
AGRADECIMIENTOS
A UNISEC-México, así como a la UANL por realizar este tipo de concursos y no dejar que muera esa pasión por la tecnología y las misiones espaciales.
Al ITN por ser la institución que nos da las herramientas para competir.
* Instituto Tecnológico de Nogales.
Contacto: karinareyeslio@hotmail.com
REFERENCIAS
Sánchez C., Á.E., et al. (2016). Picosatélites educativos cansat: Primer Concurso Nacional en México. Celerinet, Año 4, Vol. VII. 20-28.
UANL, et al. (2016). 2° Concurso Nacional de Ppicosatélites Educativos Cansat. Consultado el 19 de agosto de 2016. http:// concursoscansat.com/documentos/cansat2016/ Convocatoria_2do_Concurso_CanSat%202016.pdf
UNAM. (2015). Manual cansat. Consultado el 19 agosto de 2016. http://rue.unam.mx/Eventos/Realizados/CANSAT_II/ Manual_Cansat_RUE_AEM.pdf
Recibido 8-8-16
Aceptado 10-9-16