Generación de trayectorias de aprendizaje a través de modelos educativos de planificación

CRISTINA MAYA PADRÓN*, ROMEO SÁNCHEZ NIGENDA*
CIENCIA UANL / AÑO 19, No. 77, ENERO-FEBRERO 2016
Investigaciones recientes hacen hincapié en la necesidad de estudiar a mayor profundidad las trayectorias escolares desplegadas por los estudiantes a lo largo de su proceso formativo (recorrido que sigue un alumno desde su ingreso, estancia y egreso), (1-3) con el fin de prevenir la deserción escolar y mejorar el aprendizaje de los estudiantes.
La deserción escolar resulta de un proceso en el que intervienen múltiples factores y causas, característicos de los niños y jóvenes y de sus situaciones socioeconómicas (factores extraescolares), y otros más asociados a las insuficiencias del propio sistema educativo (factores intraescolares) como problemas de desempeño escolar: bajo rendimiento, mala conducta y problemas asociados a la edad. (4,5)
Para dimensionar la gravedad del problema de deserción escolar en México, durante el ciclo 2008-2009, de 3,923,822 estudiantes que se inscribieron en el nivel medio superior, 622830 desertaron, es decir, 3114 alumnos por día escolar hábil. (6) El problema no es exclusivo de México ni del nivel medio y superior. La Comisión Económica para América Latina y el Caribe (CEPAL) reporta elevadas tasas de deserción escolar en Latinoamérica, cerca de 37% de los adolescentes latinoamericanos abandona sus estudios una vez completada la secundaria. (7)
Los problemas de aprendizaje no surgen de improviso, (8) de ahí la importancia de analizar las trayectorias escolares de los estudiantes, con el fin de implementar acciones preventivas y de promoción de los hábitos de estudio.
Debido a lo anterior, el Instituto de Ciencias de la Educación, de los Estados Unidos, recomienda personalizar el entorno de aprendizaje y el proceso de instrucción de los estudiantes. (2) Estas investigaciones sugieren tecnologías que permitan al estudiante mayor acceso al currículum que deben cubrir, que les ayude a fijar sus propios objetivos, y generen actividades de aprendizaje que se ajusten a sus habilidades específicas, sujetas a su disponibilidad de tiempo y preferencias de estudio. Considerar los diferentes recursos y restricciones del sistema educativo, les facilitaría el proceso de aprendizaje a través del tiempo, y se tratará de prevenir así la deserción escolar. Para impulsar el progreso de tal tecnología, nuestra investigación propone el diseño, desarrollo y uso de modelos educativos con la planificación de inteligencia artificial, que nos permitan capturar la información necesaria para construir y organizar trayectorias personalizadas de aprendizaje (planes educativos). Estas trayectorias de aprendizaje consisten en las tareas que promoverán el aprendizaje de los estudiantes
El propósito es que dichas trayectorias de aprendizaje (representadas como planes) funjan como la columna vertebral que agrupe los objetivos de aprendizaje que los estudiantes deben cumplir a lo largo de sus estudios, junto con las acciones educativas necesarias para lograrlos.
Entre los trabajos encontrados, en un intento de personalización de la educación, se encuentran aquellos relacionados con los sistemas gestores de aprendizaje (LMS, por sus siglas en inglés). Los trabajos más recientes en esta área se han concentrado en modelar trayectorias de aprendizaje con estándares E-Learning. (9) Los modelos generados a través de estos estándares, al igual que los propuestos por nuestra investigación, consideran propiedades afines que deben generar correctamente trayectorias de aprendizaje, como duración en las actividades de aprendizaje, (10-13) y las restricciones en los recursos educativos. (14-16)
Sin embargo, la principal diferencia de nuestro trabajo, con respecto a los presentes en la bibliografía, es que nuestros modelos no se encuentran acotados por las propiedades consideradas por los estándares E-Learning. Nuestro trabajo modela directamente trayectorias de aprendizaje con lenguajes declarativos de planificación inteligente, lo cual simplifica la tecnología al eliminar la compilación entre los estándares ELearning y los de planificación. De manera que tenemos tres ventajas principales sobre otros trabajos: a) nos permite considerar propiedades no presentes en otros modelos, al enriquecer aún más nuestros modelos educativos de planificación con preferencias de usuarios y métricas complejas de acumulación de objetivos; b) nos permite utilizar algoritmos de planificación existentes, (17) al obtener soluciones diferentes que puede analizarlas el tomador de decisiones; y c) nos permite realizar un primer análisis de aquellas propiedades que tienden a incrementar la complejidad de solución de los modelos educativos de planificación, con el fin de generar, en un futuro cercano, algoritmos más eficientes para su solución.
Importa comentar que los modelos que generamos son flexibles en el sentido en que pueden servir como base para incluirse en los LMS, ya que las propiedades más importantes que utilizan los LMS para describir actividades de aprendizaje (duración, recursos, scores) están implícitas en nuestros modelos. Además, las métricas de calidad que diseñamos pueden modificarse fácilmente, para capturar diferentes funciones de calidad que los LMS consideren.
DESCRIPCIÓN DEL MODELO
Para poder generar trayectorias de aprendizaje, necesitamos primero diseñar y desarrollar modelos educativos de planificación. Para desarrollar tales modelos, proponemos técnicas de planificación inteligente (18) que nos permitan capturar las materias y temas de un currículum educativo, las actividades de aprendizaje y las relaciones entre ellas, los recursos del sistema, y métricas para evaluación. A continuación describimos formalmente las características de nuestros modelos.
Modelo
Un modelo educativo se visualiza como una red jerárquica de tareas J con los siguientes elementos: <m, t,=»» s,=»» a=»»>.
Donde M es un conjunto de materias que el estudiante debe satisfacer como parte de su plan de estudios; T es un conjunto de temas que mantiene una relación jerárquica única B t,m, donde t ∈ T y m ∈ M. S es un conjunto de subtemas que mantiene una relación jerárquica única C s,t, donde s ∈ S y t ∈T, y A es el conjunto de actividades de aprendizaje que el estudiante pudiera seleccionar, y que a su vez mantiene una relación jerárquica La,s, donde cada a ∈ A y s ∈ S. Cada actividad a se define con la tupla a= <ga, da,ra> , donde ga ejemplifica el score obtenido por el estudiante, si la actividad se completa exitosamente. Todo elemento ga lo define {ga ∈Ν | ga ≥ 0 ∧ ga ≤ 100}. ga representa el tiempo estimado para realizar la actividad da , mientras que ra representa el recurso educativo asignado para que la activada a pueda llevarse a cabo.
Además de las relaciones jerárquicas entre los nodos de la red, también modelamos relaciones de precedencia (ambos tipos de relaciones pueden visualizarse en la figura 2). Una relación de precedencia entre materias se define como:
RM={(α, β)|α, β ∈ M ∧α ≠ β M} , donde se indica que la materia α precede a la materia β. Es decir, para que el estudiante tome la materia β necesita haber obtenido los conocimientos de la materia α.
De manera análoga, tenemos la relación de precedencia entre temas, esta relación se define como:
RT = {(χ ,δ)| χ, δ ∈ T ∧ χ ≠ δ}, donde un tema δ, de una determinada materia m, no puede estudiarse si no se ha cubierto un tema χ anterior. Se asume que el primer tema de una materia no tiene predecesores.
La relación de precedencia entre subtemas se define como:
RS = {(ε ,φ)|ε,φ ∈ S ∧ ε ≠ φ} , donde se indica que ninguna actividad de aprendizaje α que pertenece al subtema φ ha realizarse si antes no se realiza, al menos, una actividad de aprendizajeα del subtema anterior ε . Además, de lo anterior existe una relación CS,t.
La relación de precedencia entre actividades de aprendizaje se define como:
RA ={(κ,λ)|κ,λ ∈A∧ κ ≠λ}, donde se indica que la actividad de aprendizaje κ precede a la actividad λ. A diferencia de los temas y subtemas, las actividades de aprendizaje pueden o no tener precedencia implícita entre ellas.
Métrica de acumulación de calidad
Nuestro problema requiere que cada actividad de aprendizaje reporte el score ga obtenido por el estudiante; es decir, la calidad con la que se realizó la actividad. Estos scores se propagan por la jerarquía de tareas para determinar su contribución a la calidad total de otros nodos de la red, como los subtemas, temas y materias. La propagación de estos valores se realiza al utilizar ponderaciones. Estas ponderaciones dan al usuario la libertad de asignar una mayor importancia a un determinado tema o subtema en el modelo. Cada tema posee una ponderación ft ; y cada subtema, una ponderación es ; ambas ponderaciones toman valores en el intervalo [0.1].
Solución
Una solución P donde P ⊆ A es una secuencia de actividades de aprendizaje {a1 ,a2,…,an } seleccionadas para el estudiante, que satisfacen la siguiente restricción:
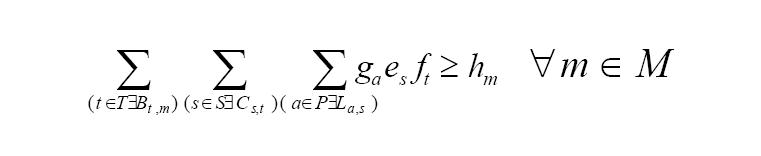
Donde hm es una constante que indica la calificación mínima requerida para aprobar una materia. Es decir, no se seleccionarán todas las actividades que un instructor/profesor haya diseñado para la materia, sino aquéllas que satisfagan la acumulación de score requerido por el usuario (la constante de calificación mínima). De manera que la cantidad de actividades de aprendizaje que contenga dicha solución se acota a la satisfacción de acumulación de score.
Codificación del modelo educativo
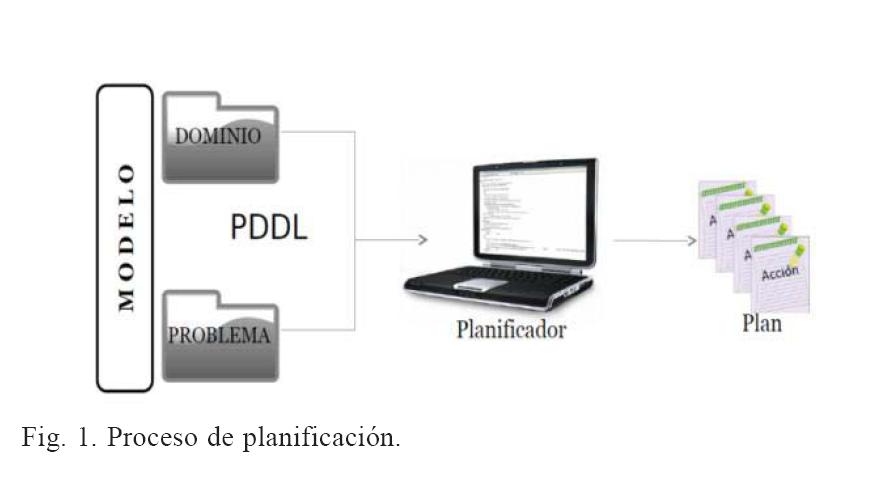
El modelo educativo propuesto en la sección anterior lo codificamos con PDDL (Planning Domain Definition Language),19 el cual es un lenguaje declarativo (y estándar) para codificar dominios de planificación. El algoritmo de planificación toma entonces estos modelos y genera, como solución, un plan (en nuestro caso una secuencia ordenada de actividades de aprendizaje). Observamos gráficamente el proceso de planificación en la figura 1.
Las materias, temas, subtemas y actividades de aprendizaje se modelan a través de predicados de PDDL, en las que un predicado representa las relaciones entre los objetos que conforman el modelo.20
Los predicados que representan las relaciones de jerarquía son: “isPartOfSubtheme” para la relación La,s, “isPartOfTheme” para la relación Ca,s y “isPartOfSubject” para la relación B t,m [21].
Asimismo, para representar en PDDL las actividades de aprendizaje que el estudiante debe realizar para satisfacer los objetivos de aprendizaje, se modelan acciones, funciones de transición que nos permiten cambiar el estado actual de la materia, como el score acumulado y los objetivos realizados. Estas acciones se especifican con el nombre de la acción, las condiciones previas que debe haber para aplicar la acción y efectos que cambian la situación del mundo.
Ahora, para representar la tupla a= <ga ,da,ra> utilizamos funciones numéricas, las cuales se construyen como operadores aritméticos de expresiones numéricas primitivas, con sintaxis prefija. De manera que para modelar ga se utiliza la función numérica “valueLA”. Esta función se utiliza como parte del efecto de las acciones de las actividades de aprendizaje. De manera similar, para la duración de una actividad de aprendizaje da se modela a través de la cláusula de “duration” de las acciones de actividades de aprendizaje con la función numérica “DurationLA”. Y por último, para describir los recursos ra utilizamos el predicado “KindResourceLO” para el tipo de recursos asociado a la actividad de aprendizaje y la función numérica “quantity-resource” para la cantidad de estos recursos.
Si lo que se modela son las relaciones de precedencia, en PDDL, se realiza a través de condiciones previas en las acciones. De manera que para representar la relación Rs modelamos la condición (> (score ?req ?s) (* (amount-in-subtheme ?oa) (percentSubtheme ?req))), la cual es una conjunción de funciones numéricas.
La función numérica “amount-in-subtheme” indica la preferencia del usuario con respecto a la cantidad de score que debe acumular un subtema anterior.
Para la acumulación de calidad, el score ga de una actividad de aprendizaje, se modela en PDDL con la función numérica “valueLA”. Asimismo, las ponderaciones f t y e s se representan con las funciones numéricas “percentTheme” y “percentSubtheme”, respectivamente.
Evaluación del modelo educativo
El diseño de nuestros experimentos se enfoca en evaluar dos de las características que creemos más importantes, si deseamos que la tecnología escale a problemas del mundo real, es decir, que las materias de un plan de estudios que un estudiante curse en un ciclo escolar puedan modelarse en su totalidad y los algoritmos de planificación puedan ser capaces de dar solución (generar planes –trayectorias de aprendizaje–). Esto con la finalidad de que los utilicen los estudiantes y tratar así, cn base en las investigaciones que favorecen la personalización de la educación, mejorar su rendimiento escolar y de alguna manera atacar una de las causas de la deserción escolar.
Las primeras características a evaluar en los modelos educativos de planificación es la densidad de actividades de aprendizaje y el tamaño de la jerarquía en el modelo. La segunda es la densidad en las relaciones de precedencia entre las actividades de aprendizaje y los nodos de la red educativa. Se asumió para el proceso de modelación un único estudiante, y que los recursos asociados a las actividades de aprendizaje son ilimitados.
Se definieron tres clases de problemas basados en el tamaño de la red: la clase pequeña comprende de uno a tres temas, subtemas y actividades de aprendizaje. La clase mediana considera de cuatro a cinco el número de hijos en la jerarquía de los nodos en la red, y la grande eleva el número de hijos de entre seis a siete. Esto nos da como resultado, en un árbol jerárquico completo, un total de 27 actividades de aprendizaje para la clase pequeña, 125 para la clase mediana y 343 para la grande, para el valor máximo de los rangos que comprenden las clases por materia.
La función objetivo establecida en los modelos educativos de planificación propuestos es minimizar el tiempo total (makespan) de la solución (plan). Es decir, obtener la trayectoria de aprendizaje que, en el menor tiempo posible, le garantice al estudiante la aprobación de los objetivos de aprendizaje contenidos en el modelo educativo.
Se desarrolló un generador de instancias aleatorias en lenguaje C, el cual generó 30 instancias (modelos) por materia, y se consideraron hasta cinco materias por clase. Los modelos se generan con y sin requerimientos de precedencia para evaluar las dos características principales de nuestro diseño de experimentos, densidad en la jerarquía de la red, y densidad en las relaciones internodos. En total se generaron 900 modelos de prueba con esta metodología.
El algoritmo de planificación seleccionado para evaluar nuestros modelos es SGPlan. (22) Seleccionamos SGPlan, porque este algoritmo soporta todas las propiedades de nuestros modelos educativos de planificación, y fue el que mejor se comportó en nuestras pruebas. SGPlan particiona un problema grande de planificación (como el nuestro) en subproblemas. Cada subproblema contiene sus propios subobjetivos que deben satisfacerse, pero al particionar el espacio de búsqueda se reduce exponencialmente la complejidad de solución con respecto al problema original. (22)
Al analizar cuidadosamente nuestros modelos observamos que, aunque las redes jerárquicas que estos representan son densas, los objetivos de aprendizaje por materia son en realidad independientes. Es decir, la técnica de SGPlan de particionar el problema original en subproblemas es de vital importancia para resolver nuestros modelos educativos de planificación. No es de extrañarse entonces que SGPlan haya sido el algoritmo que resolvió más problemas en nuestra evaluación.
En la figura 3 se muestran los porcentajes de instancias resueltas por SGPlan, al ejecutarse en un servidor HP DL360P G8, con dos procesadores Intel E5-2630 de seis núcleos a 2.3Ghz y 16GB de RAM. Observamos que a medida que los modelos crecen en número de materias, la efectividad de SGPlan para resolver dichos modelos disminuye. Creemos que el principal problema con los modelos educativos de planificación densos, no es en sí el número de actividades de aprendizaje que contienen, sino el proceso de propagación de la calidad de las actividades para determinar, por parte de los algoritmos, cuáles generan un mayor beneficio (impacto) a la calidad total de la trayectoria de aprendizaje. Este comportamiento se acentúa en modelos con requerimientos, ya que al introducirlos, el proceso de propagación de nuestras métricas se vuelve más complejo por el incremento en la combinatoria del problema. Observamos que, en instancias grandes, SGPlan solamente pudo resolver 3% de los modelos generados con requerimientos.
Conclusiones
En este trabajo desarrollamos modelos educativos a través de la planificación de inteligencia artificial, con el estándar PDDL que capturan las propiedades que consideramos más importantes de un plan de estudios (materias), necesarios para generar trayectorias de aprendizaje para estudiantes. Los modelos generados constituyen un primer paso en el desarrollo de tecnologías educativas que permitan la personalización de la educación; un factor potencial, según investigaciones recientes, para disminuir una de las causas de la deserción escolar que es el bajo rendimiento académico. Los modelos generados consideran actividades de aprendizaje y su jerarquía con respecto a temas y subtemas; la duración y los recursos asociados a las mismas, métricas de acumulación de calidad y diversas ponderaciones de estas métricas por los elementos del modelo. Importa remarcar que todas estas características en su conjunto no se han modelado en los trabajos encontrados.
La evaluación de nuestros modelos permitió identificar dos factores importantes que tienden a aumentar la complejidad de solución de los mismos. El primero se relaciona con la cantidad de materias y actividades de aprendizaje modeladas, es decir, la escalabilidad del modelo. El segundo factor corresponde a las dependencias entre los elementos de las materias (interconectividad). A mayor cantidad de nodos y requerimientos en los modelos, menor es el porcentaje de efectividad de los algoritmos de planificación. Creemos también que la propagación de las métricas relacionadas a los scores obtenidos por los estudiantes incrementa sustancialmente la complejidad de solución de nuestros modelos.
Los modelos desarrollados en esta investigación, así como los factores de complejidad identificados, permitirán diseñar algoritmos más eficientes de planificación. Parte de nuestro trabajo futuro consistirá en desarrollar funciones heurísticas que permitan estimar eficientemente el impacto de las actividades de aprendizaje en las soluciones generadas.
RESUMEN
Investigaciones recientes sugieren que uno de los factores más importantes para disminuir la deserción escolar y mejorar el desempeño de los estudiantes es diseñar tecnologías educativas que permitan personalizar trayectorias de aprendizaje. Un primer paso es diseñar y desarrollar modelos educativos que capturen las complejas propiedades del entorno académico del estudiante. Nosotros desarrollamos modelos educativos con técnicas avanzadas de planificación de inteligencia artificial para generar trayectorias (planes) de aprendizaje personalizados. El análisis y evaluación de los modelos propuestos nos permiten identificar los factores que incrementan la complejidad de solución de los mismos. Los resultados de esta investigación permitirán en un futuro desarrollar algoritmos más eficientes de planificación.
Palabras clave: Planificación inteligente, PDDL, Modelación computacional, Modelos educativos, Trayectorias de aprendizaje.
ABSTRACT
Recent research suggests that one of the most important factors in reducing dropout rates and improving the student´s performance is to personalize learning. In order to do so, it is required to design and develop educational models that capture the complex properties of the student’s academic environment. We develop educational models using advanced planning techniques from the area of artificial intelligence to generate personalized learning trajectories (plans). The analysis and evaluation of the proposed models allow us to identify the factors that increase solution complexity. The findings of our research will facilitate, in the future, the development of more efficient planning.
Keywords: Intelligent planning, PDDL, Computational modeling, E-learning, Learning designs.
*Universidad Autónoma de Nuevo León.
Contacto: cristina.mayapd@uanl.edu.mx; romeo.sanchezng@uanl.edu.mx
REFERENCIAS
1. H. Pashler, P. Bain, B. Bottge, A. Graesser, K. Koedinger, M. Mc-Daniel, J. Metcalfe, Organizing Instruction and Study to Improve Student Learning (NCER 2007-2004), Technical Report, Washington, DC: National Center for Education Research, Institute of Education Sciences, U.S. Department of Education, 2007.
2. M. Dynarski, L. Clarke, B. Cobb, J. Finn, R. Rumberger, J. Smink, Dropout Prevention: A Practice Guide (NCEE 2008-4025), Technical Report, Washington, DC: National Center for Education Evaluation and Regional Assistance, Institute of Education Sciences, U.S. Department of Education, 2008.
3. Smith, Grace E., and Stephanie Throne. Differentiating instruction with technology in K-5 classrooms, International Society for Technology in Education (ISTE), 2007.
4. Espíndola, E., y León, A. La deserción escolar en América Latina: un tema prioritario para la agenda regional. Revista Iberoamericana de Educación, 2002, (30), 3.
5. Valdez, E.A., Román, R., Cubillas, M.J. y Moreno, I. ¿Deserción o autoexclusión? Un análisis de las causas de abandono escolar en estudiantes de educación media superior en Sonora, México. Revista Electrónica de Investigación Educativa, 2008, (10), 1. Consultado el 09 de junio de 2004 en: http://redie.uabc.mx/vol10no1/ conteniod-valdez.htm
6. Programa Síguele, Caminemos Juntos. Acompañamiento integral para jóvenes de la educación media superior. Secretaría de Educación Pública. Agosto, 2011. http://www.siguele.sems.gob.mx/
7. Comisión Económica para América Latina y el Caribe. Elevadas tasas de deserción escolar en América Latina. En CEPAL, Panorama Social de América Latina 2001-2002. 2003.
8. Ortiz, I. y Palafox, E. Problemas de los estudiantes con relación a su ingreso, trayectoria escolar y egreso. Seminarios de Diagnóstico Locales. Comisión Especial para el Congreso Universitario. Universidad Autónoma de México. http://www.cecu.unam.mx/ ponsemloc/ponencias/1127.html.
9. R. Barchino, J.M. Gutiérrez, S. Otón, An example of Learning Management System in: IADIS Virtual Multi Conference on Computer Science and Information Systems (MCCSIS 2005).
10. L.C. Morales Reynaga. Generación automática de diseños de aprendizaje: diferentes enfoques de planificación. Master’s thesis, Universidad de Granada, 2008.
11. L.C. Morales Reynaga, Generación automática de diseños de aprendizaje: diferentes enfoques de planificación. Ph.D. thesis, Universidad de Granada, 2011.
12. L. Castillo, L. Morales, A. González-Ferrer, J. Fernández-Olivares, O. García-Pérez, Knowledge Engineering and Planning for the Automated Synthesis of Customized Learning Designs, Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics) (2007).
13. L. Castillo, L. Morales, A. González-Ferrer, J. Fdez-Olivares, D. Borrajo, E. Onaindia, Automatic generation of temporal planning domains for e-learning problems, Journal of Scheduling (2010).
14. A. Garrido, E. Onaindia, O. Sapena, Automated planning for personalised course composition in: Advanced Learning Technologies, 2009. ICALT 2009. Ninth IEEE International Conference on.
15. A. Garrido, E. Onaindia, On the Application of Planning and Scheduling Techniques to E-learning in: 23rd Int. Conference on Industrial, Engineering& Other Applications of Applied Intelligent Systems (IEA-AIE2010).
16. Garrido, A., Onaindia, E., Morales, L., Castillo, L., Fernández, S., Borrajo, D.: Modeling e-learning activities in automated planning. In: Proceedings of the 3rdInternational Competition on Knowledge Engineering for Planning and Scheduling (ICKEPSICAPS 2009), pp. 18–27 (2009).
17. ICAPS, ((Home Page ICAPS)), recurso libre, disponible en http:/ /ipc.icapsconference.org/, 2013.
18. Inteligencia artificial. Un enfoque moderno, Pearson Educación, 2004.
19. M. Fox, D. Long.PDDL2.1: An Extension to PDDL for Expressing Temporal Planning Domains. Journal of Artificial Intelligence Research. 2003. 20:61-124
20. Helmert, M. Concise finite-domain representations for PDDL planning tasks. Artificial Intelligence. 2009, 173:503–535
21. Maya-Padrón, C. Modelación de planes de estudio usando técnicas avanzadas de planificación, Master’s thesis, Universidad Autó- noma de Nuevo León, 2013.
22. Hsu, C.W. y B. W.Wah, The SGPlan Planning System in IPC-6, Association for the Advancement of Artificial Intelligence, 2008.
Aceptado: 07/05/15
Recibido: 19/01/15